 ️
️Thiết Kế Cơ Cấu Gắp Và Thả Vật (Pick and Place)
- 2021-11-14
- THIẾT KẾ- CHẾ TẠO MÁY
- 11 phút đọc
Đúng như tên gọi, gắp và thả vật (Pick and Place: gọi tắt là P&P) là một cơ cấu thực hiện một chuỗi các động tác: gắp và nâng vật ở một vị trí cụ thể, vận chuyển đến một vị trí định trước, hạ vật thể xuống và lắp đặt nó theo yêu cầu đã đề ra.

Thông qua bài toán cụ thể là thiết kế P&P, tác giả sẽ giới thiệu các cân nhắc và tính toán cần thiết để thiết kế một thiết bị nói chung qua chuỗi bài viết dưới đây.
Trước khi đi vào từng bài viết cụ thể, chúng ta cần hình dung về P&P. Để dễ hình dung, bạn đọc có thể tham khảo video ở link dưới đây:
https://www.youtube.com/watch?v=yep3vG2tvLo
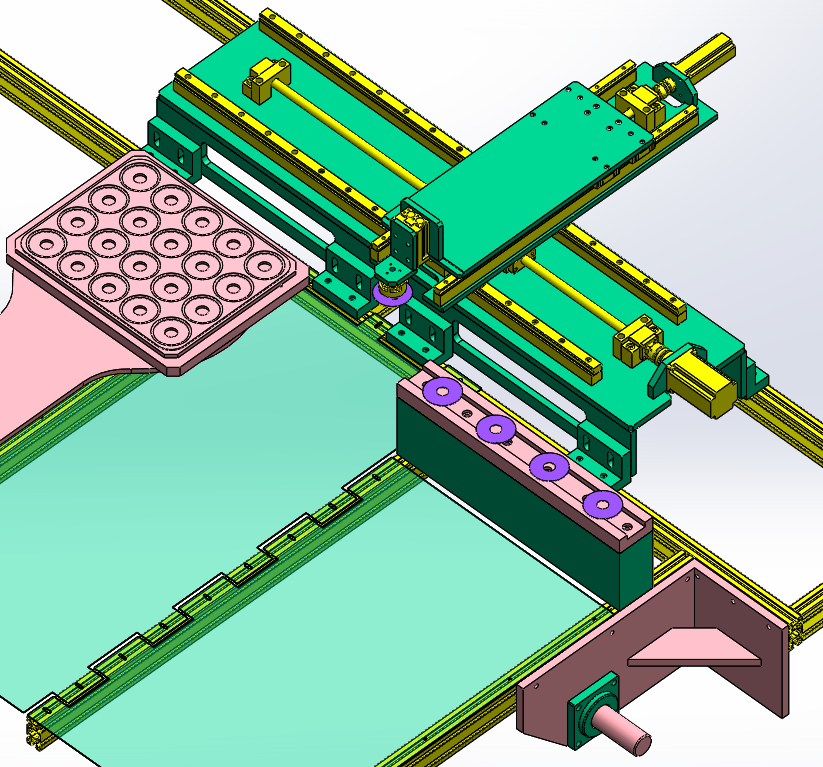
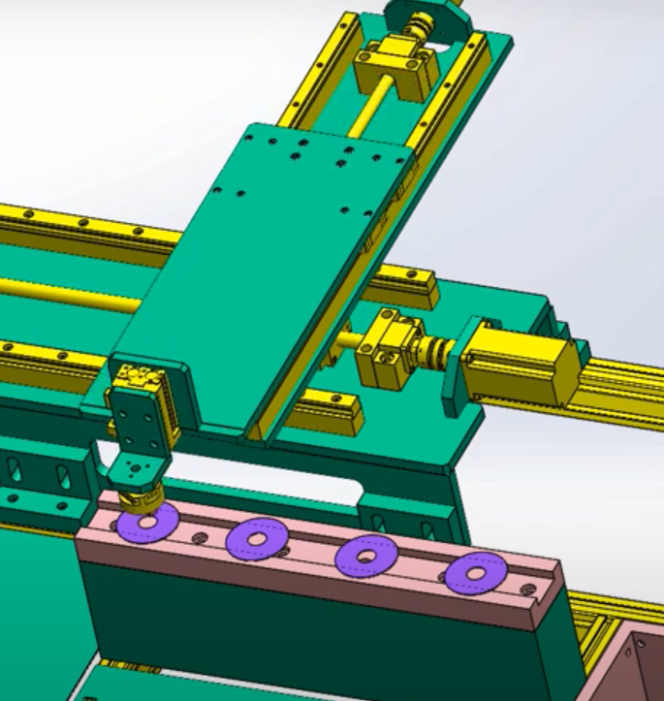
Hình 1. Cơ cấu gắp và thả vật P&P
Các thông số kĩ thuật của cơ cấu thiết bị:Khối đặt gồm 4 vật được vận chuyển nhờ băng tải tới P&P. Tại đây P&P gắp từng vật rồi nâng lên, di chuyển vật đến giá để hàng và thả vật vào đúng vị trí đã định từ trước.
| Vật | Giá để hàng | Cơ cấu P&P và tay gắp |
|
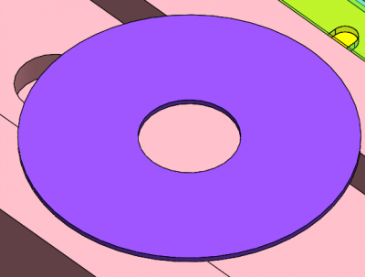
Đường kính ngoài: 63.5mm Đường kính trong: 19.05mm Độ dày: 1.0mm Vật liệu: Thủy tinh Khối lượng: 8g |
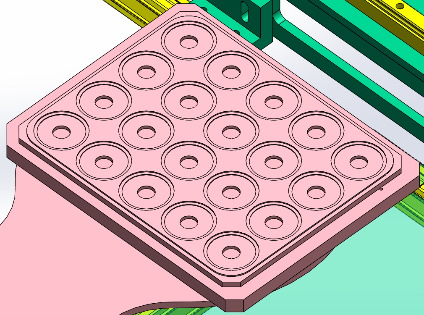
Khả năng chứa vật: 20 tấm (trục X: 5 tấm、trục Y 4 tấm, khoảng cách tâm vật 70mm) |
Vận tốc di chuyển (X,Y):250mm/s Y: 210mm, Z:20mm |
Bài 1: Tính toán tĩnh học
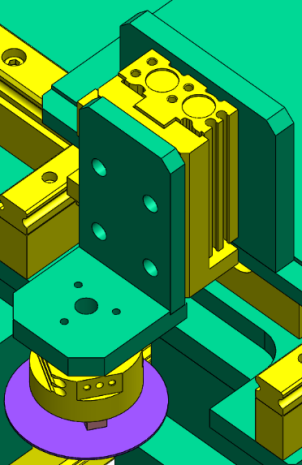
Trong cơ cấu gắp thả vật, trước lúc gắp hay thả vật ở một vị trí cho trước nào đó, phần tay gắp trục Y (Hình 2) phải vươn ra so với trọng tâm cơ cấu.Vì phần này to và có khối lượng đáng kể nên chúng ta sẽ xem xét tới độ võng xuống và độ nghiêng của trục Y.
Hình 2. Trục Y lúc gắp vật
Thanh dẫn hướng trục Y như ở trạng thái cho ở hình 2, để phục vụ tính toán chúng ta vẽ phác họa lại ở hình 3.
Để giảm nhẹ khối lượng, vật liệu được chọn là nhôm (A5052 hoặc A2017)
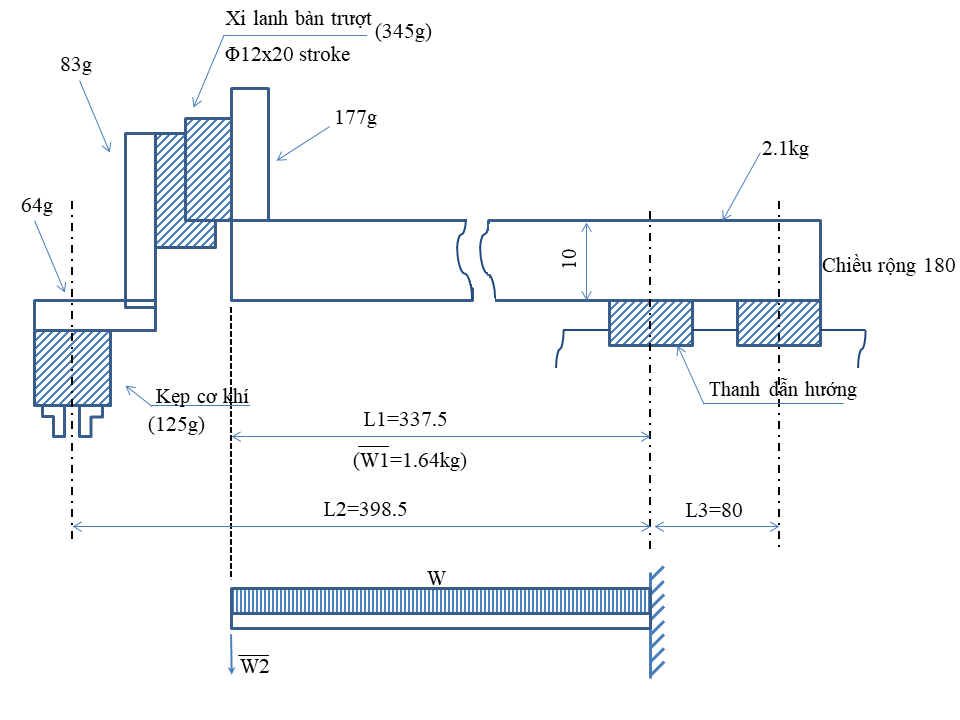
Hình 3. Phác họa cơ cấu gắp và thả vật
Độ võng phần đầu của tấm L1 bao gồm độ võng của bản thân khối lượng tấm L1 và độ võng của phần gắp vật. Vì vậy, chúng ta sẽ đi tính riêng từng thành phần.
Độ võng của bản thân khối lượng tấm L1:

Trong đó
E: Suất đàn hồi (modul Young)
I: Mô men quán tính mặt cắt ngang
Độ võng của phần gắp vật:
Tuy tổng khối lượng của các bộ phận cấu thành nên phần gắp vật là 794g, thực tế lắp ghép còn có thêm bu lông, các linh kiện khí nén…chiếm thêm khoảng 15% khối lượng tổng. Vì vậy chúng ta sẽ tính toán tổng khối lượng thực tế là 1kg. Độ vọng của phần gắp vật lúc này sẽ là:

Vậy độ võng tổng phần đầu của tấm L1 lúc này sẽ là:

Với độ võng này, chúng ta sẽ xem xét xem nó có ảnh hưởng gì đến phần gắp vật.
★=(0.2/337.5)*398.5≈0.24(mm)
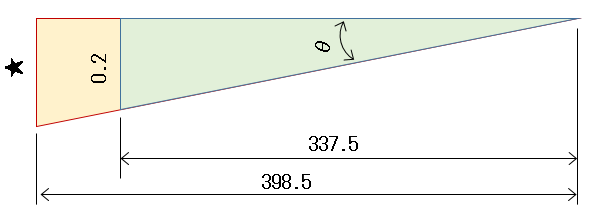
Với giá trị ★ trên chúng ta có thể bỏ qua và coi như không ảnh hưởng tới vị trí gắp vật theo trục Z (thực tế lúc lắp đặt chúng ta có thể điều chỉnh được)
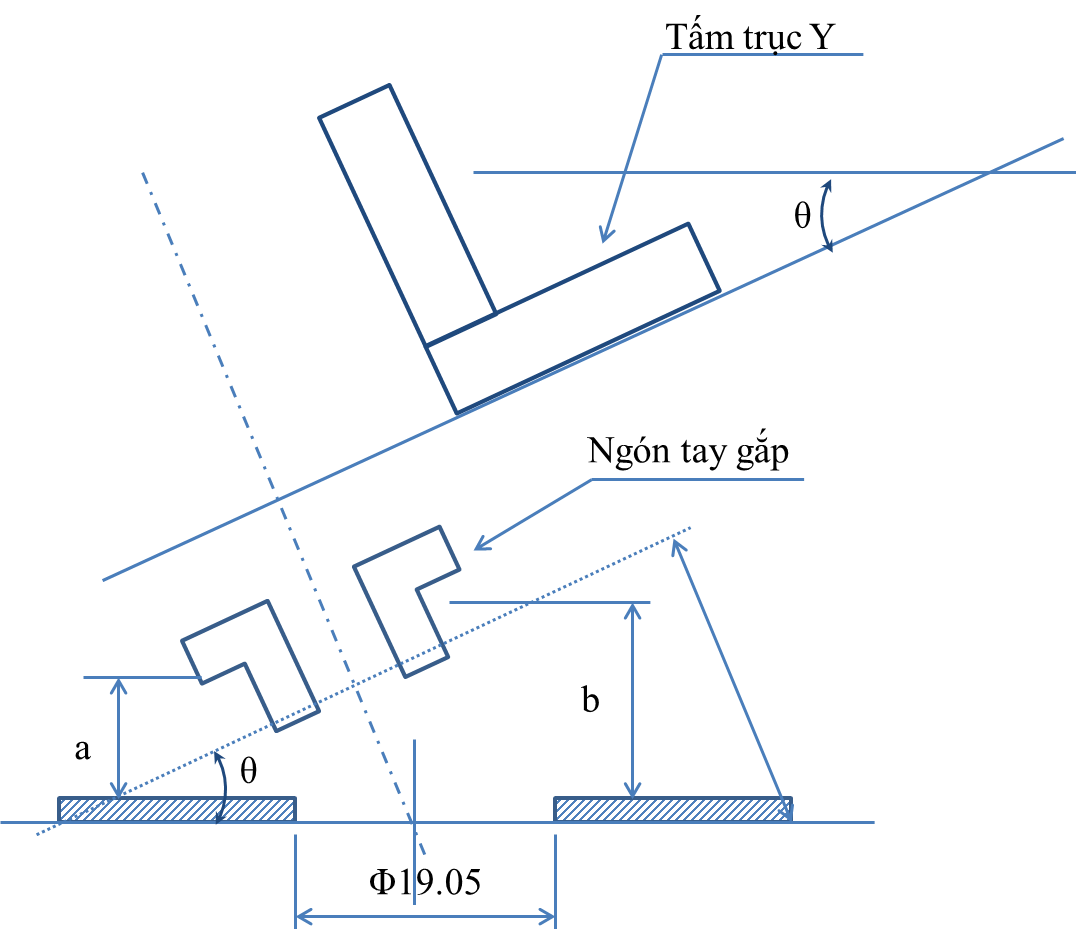
Hình 4. Ảnh hưởng bởi độ võng tới vị trí gắp vật theo mặt cắt
Xét theo mặt cắt của vật (Hình 4), Đường kính ngoài của vật là 63.5mm nên ta có thể tính được độ lệch về chiều cao phía hai đầu của vật là:
Độ lệch này nhỏ hơn nhiều so với độ dày của vật nên ta có thể bỏ qua.
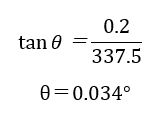
Việc xem xét các ảnh hưởng khác tới góc lệch θ cũng là cần thiết. Đối với một hệ thống máy thì độ ảnh hưởng này có thể thiết lập tại giá trị 0.05° khi xét tới các thành phần ảnh hưởng như kích thước của hệ thống máy, điều kiện xử lý vật, dung sai thiết kế…(góc lệch với giá trị 0.05° được xem là hợp lý)
Khi đó, khi giải quyết bài toán góc lệch θ chúng tôi nghĩ rẳng sẽ không chỉ quan tâm đến ảnh hưởng của độ võng mà còn cần xem xét các thành phần ảnh hưởng khác kể trên.
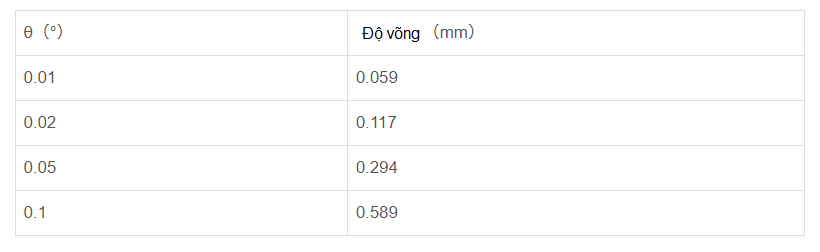
Chúng ta thử xem xét một chút về sự ảnh hưởng của góc lệch θ. Sự tương quan giữa góc lệch θ và độ võng được cho ở bảng dưới.
Ở Hình 4, do phát sinh góc lệch θ nên phần ngón tay gắp bị nghiêng theo phương thẳng đứng. Chúng ta sẽ cùng xem xét nếu để nguyên hiện trạng này, xi lanh bàn trượt hạ xuống để gắp vật sẽ như thế nào.
Coi bề mặt vật theo phương ngang làm mốc thì độ cao của ngón tay gắp vật (a,b) là khác nhau nên sẽ xảy ra các trường hợp sau:
- Ngón tay gắp không vào được lỗ trong (a vào trước còn b không vào được)
- Lúc gắp (kẹp) vật, vật sẽ bị kéo lê đi một đoạn nhỏ do khoảng cách đường lỗ trong tới hai phía tay gắp khác nhau.
- Lúc vận chuyển vật ở trạng thái bị nghiêng, vật sẽ dễ bị rơi.
Ở trường hợp nào cũng đều không tốt, nhưng trường hợp xấu nhất là (3), ở trường hợp (2) thì sẽ ảnh hưởng đến chất lượng sản phẩm (vật có thể bị xước, cong…) nên cũng cần chú ý.
Ở cơ cấu P&P, sự cố hay gặp phải thường liên quan đến phần tay gắp. Trong tính toán độ võng, tuy chúng ta đã xem xét đến độ cứng cơ học, nhưng cũng cần xem xét xem cơ cấu đã thỏa mãn yêu cầu độ chính xác chưa, có khả năng xẩy ra sự có gì không.
Nếu bỏ qua không xem xét các yếu tố này, sau này chính các yếu tố này sẽ là nguồn gốc gây ra sự cố. Tuy mất nhiều công sức ban đầu để xem xét nhưng chúng ta cần đề cao phương châm “phòng hơn chữa”.
Tuy lần này chúng ta chỉ cân nhắc tới độ võng của trọng lượng, trong thực tế còn có những ảnh hưởng ở những phương hướng khác nhau. Vì vậy, bài viết tiếp theo sẽ đề cập đến cách chọn thanh dẫn hướng cũng như các cơ cấu cơ khí khác.
Trên đây là bài viết về thiết kế cơ cấu gắp và thả vật. Cảm ơn các bạn đã ghé thăm blog, mọi ý kiến góp ý xin để lại ở phần comment bên dưới bài viết
Tác giả bài viết: Đinh Văn Hòa
Nguồn: https://jp.meviy.misumi-ec.com/info/ja/archives/9130/
Từ khóa liên quan: Thanh dẫn hướng LM, vít me, cảm biến , Động cơ servo







0 Bình luận