 ️
️[Bài viết số 1] Vai trò của Encoder
- 2023-03-05
- TỰ ĐỘNG HÓA
XT Mechanical Blog xin chào các bạn, hôm nay sẽ là bài viết đầu tiên trong chuỗi bài viết "Kiến thức cơ bản về Encoder". Chúng tôi sẽ rất vui nếu như những nội dung của chuỗi bài viết này cung cấp cho các bạn kiến thức cơ bản nhất cũng như những ứng dụng của Encoder trong công nghiệp. Nào hãy cùng bắt đầu. (Bài viết dành cho những bạn chưa biết gì về “Enconder”, bạn nào biết rồi có thể bỏ qua vì nó rất cơ bản nhé)

Mục lục
1-1. Đo số vòng quay và tốc độ quay
1-2. Encoder là gì?
1-3. Ứng dụng của Encoder
1-1. Đo số vòng quay và tốc độ quay
Có nhiều loại máy chính xác trong công nghiệp cũng như trong dân dụng xung quanh chúng ta. Chẳng hạn như các thiết bị đồ điện, điện tử dân dụng, hay như robot và máy móc dùng trong nhà máy, v.v.
Các loại thiết bị và máy móc này về cơ bản được cấu thành như sau:
- Cảm biến dùng để phát hiện chuyển động và trạng thái của máy
- Bộ điều khiển dùng để phán đoán và xử lý tín hiệu từ các cảm biến
- Cơ cấu chấp hành dùng để vận hành máy móc dựa trên thông tin được xử lý bởi bộ điều khiển
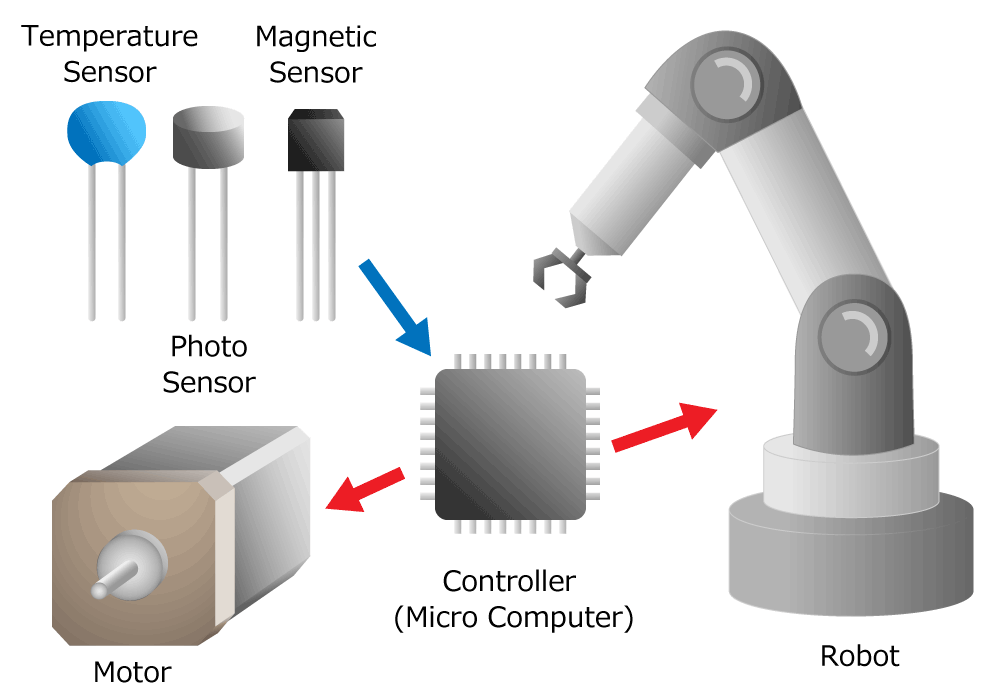
Hình 1. Sự cần thiết của cảm biến trong điều khiển máy móc
Để điều khiển các loại máy với độ chính xác cao và có đáp ứng nhanh, thì cần phải nhận biết chuyển động và trạng thái của máy. Do đó, một thiết bị điện tử được gọi là Encoder được sử dụng để đo góc quay hay quãng đường chuyển động, tốc độ quay hay tốc độ chuyển động thẳng.
Vậy chính xác thì Encoder là gì?
1-2. Encoder là gì?
Encoder là một cảm biến dùng để mã hóa góc quay hoặc chuyển vị tuyến tính. Chắc hẳn khi nghe đến Encoder lần đầu tiên, hầu hết mọi người không liên tưởng ngay nó với "chuyển động quay", và tên gọi "Encoder" xuất phát từ chữ "encode" (mã hóa) trong tiếng Anh.
Có hai loại Encoder thường gặp. Encoder chuyển động quay (nhận biết chuyển động quay) còn được gọi là Encoder vòng quay và Encoder chuyển động thẳng (nhận biết chuyển vị tuyến tính) còn được gọi là Encoder tuyến tính.
Trong thực tế, Encoder vòng quay được sử dụng rộng rãi hơn, vì vậy nhiều khi chúng ta nói đến Encoder, chính là để chỉ Encoder vòng quay. Trong loạt bài viết của chúng tôi cũng sẽ chủ yếu trình bày kiến thức về Encoder vòng quay.
1-3. Ứng dụng của Encoder
Như đã giới thiệu ở phần đầu, Encoder được sử dụng trong các thiết bị máy móc được vận hành với đáp ứng nhanh và độ chính xác cao. Cụ thể là những máy móc làm việc nhờ động cơ. Ví dụ, Encoder được ứng dụng rộng rãi trong các robot công nghiệp như robot lắp ráp, robot hàn, xe vận chuyển tự hành hay các máy gia công được sử dụng trong nhà máy.
Tuy nhiên, có lẽ hầu hết mọi người rất ít có cơ hội tận mắt nhìn thấy một nhà máy hiện đại với các robot công nghiệp đang hoạt động không ngừng nghỉ. Do đó, trong các nội dung tiếp theo, chúng tôi sẽ giải thích các ứng dụng từ bao quát đến chi tiết của Encoder.
Tự động hóa Nhà máy (Nhà máy thông minh)
Có nhiều loại thiết bị máy móc sản xuất được sử dụng trong các nhà máy sản xuất sản phẩm điện máy hay sản xuất ô tô. Máy gia công chế tạo các bộ phận kim loại được điều khiển bởi máy tính và một máy duy nhất có thể thực hiện nhiều thao tác gia công khác nhau, chẳng hạn như mài phẳng, khoan lỗ và cắt rãnh. Máy gia công như vậy được gọi là máy trung tâm gia công. Các bộ phận hoàn thiện được gửi đến nhà máy lắp ráp và được lắp ráp tự động bởi các robot công nghiệp như máy lắp ráp chuyên dụng và cánh tay robot.
Trong các nhà máy mới nhất, quá trình tự động hóa đang ngày càng phát triển, máy tính và mạng truyền thông được sử dụng trong tất cả các quy trình sản xuất, như các khâu thiết kế, gia công bộ phận, bảo quản và quản lý, vận chuyển và lắp ráp. Ý tưởng “kết nối toàn nhà máy” này được gọi là “Công nghiệp 4.0” và những nhà máy như vậy được gọi là “Nhà máy thông minh”.
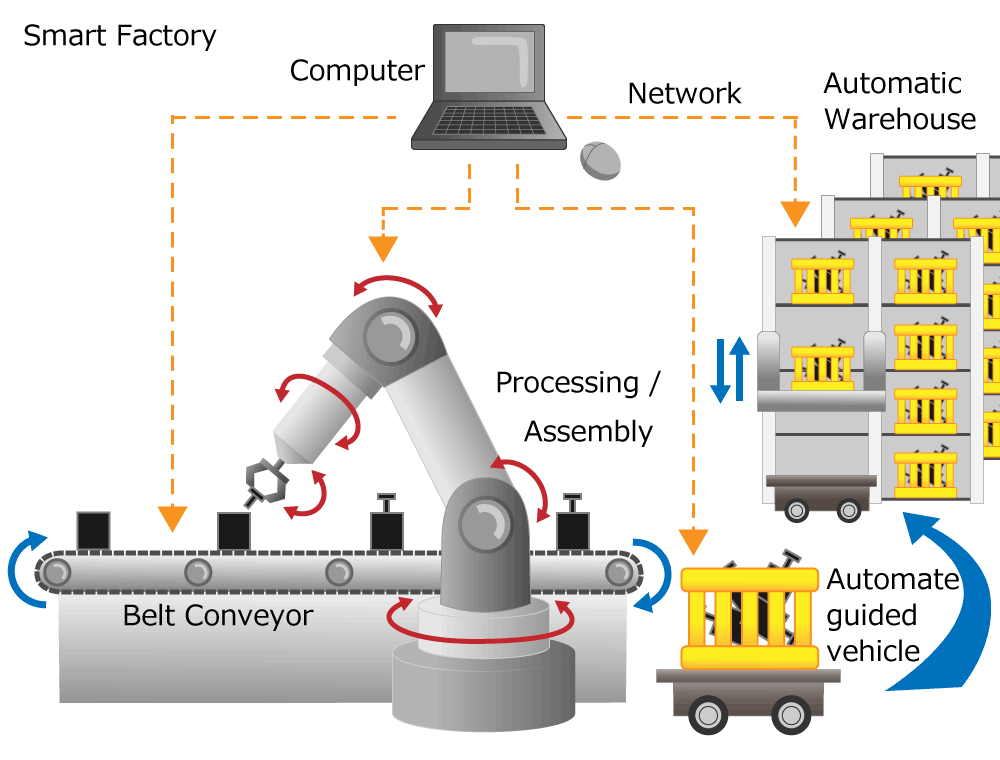
Hình 2. Hình ảnh của nhà máy thông minh
Robot công nghiệp
Robot công nghiệp đang giải phóng con người khỏi những công việc nặng nhọc và nguy hiểm, giúp tăng năng suất của nhà máy và đảm bảo chất lượng sản phẩm ổn định. Robot công nghiệp được sử dụng rộng rãi và có tính thực tiễn cao nhất là những robot đa trục khớp nối, có thể chuyển động giống như cánh tay con người, gồm nhiều khớp nối (khớp) tương ứng với vai –khuỷu tay – cổ tay của con người, và có thể làm các động tác quay tròn quanh eo (quay quanh đế cố định), quay quanh trục khớp nối (quay quanh khớp hoặc quanh trục), co duỗi (trượt). Tùy thuộc theo tín hiệu đầu vào bộ điều khiển, robot sẽ thay đổi chuyển động bằng các cơ cấu chấp hành, và thực hiện chuyển động một cách tinh vi.
Bộ phận tương ứng với "cánh tay" của con người từ vai đến cổ tay được gọi là “tay máy” (manipulator) và bộ phận tương ứng với "bàn tay" của con người từ cổ tay đến ngón tay được gọi là “bộ phận thao tác” (End Effector). Bằng cách thay đổi chuyển động của bộ phận thao tác, robot công nghiệp không chỉ có thể gắp đồ vật mà còn có thể thực hiện các công việc sơn và hàn. Nếu muốn xem thực tế những robot đa trục khớp nối này, các bạn có thể đến các buổi triển lãm về robot và máy gia công, và tham quan những sản phẩm do nhiều công ty khác nhau trưng bày.
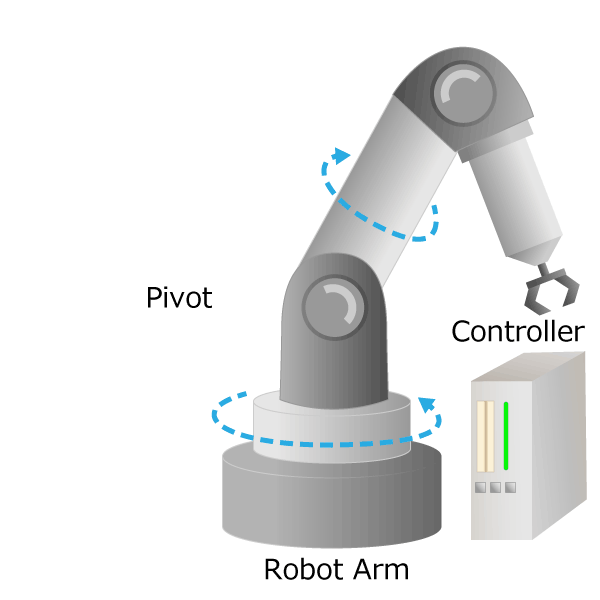
Hình 3. Sơ đồ mô hình robot công nghiệp
Cơ cấu chấp hành
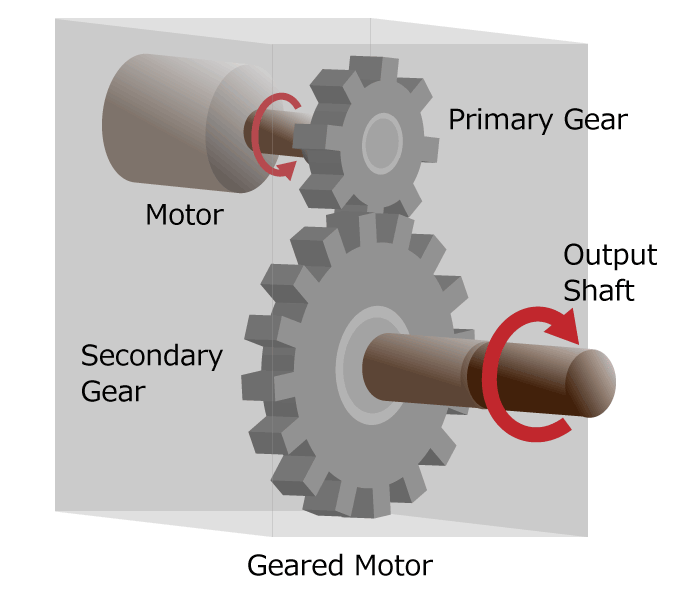
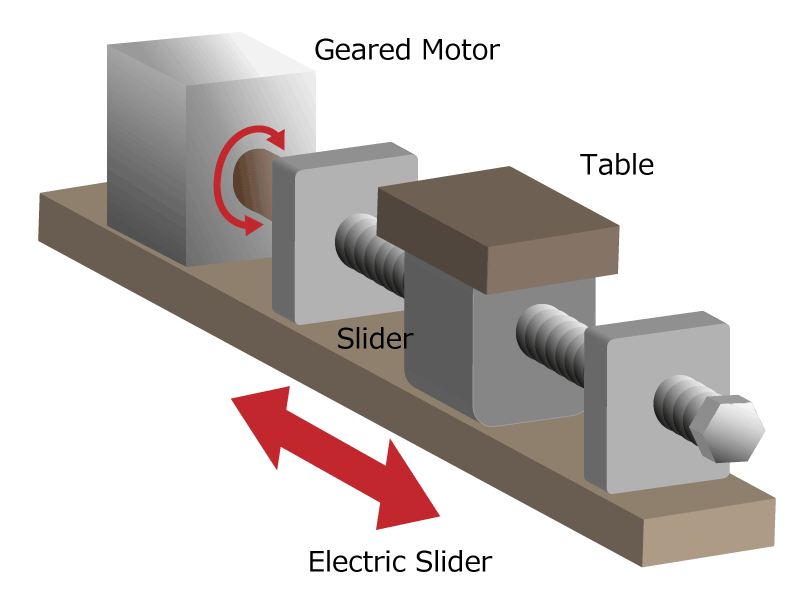
Người ta sử dụng động làm cơ cấu chấp hành cho robot vì chúng nhỏ gọn tiện lợi và có độ chính xác cao. Trên thực tế, người ta thường sử dụng những cơ cấu chấp hành có thể tạo ra lực quay (mô men xoắn) lớn khi quay quanh đế hay quanh trục khớp nối, nhờ giảm tốc độ của động cơ, bằng cách tích hợp sẵn hộp giảm tốc trên trục đầu ra của động cơ. Ngoài ra, các thanh trượt điện cũng thường được dùng vì có thể cho ra một lực lớn theo hướng chuyển động, bằng cách thay đổi chuyển động quay của động cơ thành chuyển động tịnh tiến tuyến tính nhờ trục vít của thanh trượt. Các bạn có thể quan sát những thiết bị này ở các triển lãm về động cơ và robot hoặc xem trong catalog của các nhà sản xuất.
|
|
|
|
Hình 4a. Sơ đồ mô hình hộp giảm tốc |
Hình 4b. Sơ đồ mô hình thanh trượt điện |
Động cơ servo
Rất khó để nắm bắt được hết vì có rất nhiều loại động cơ khác nhau. Ở đây, chúng tôi sẽ tập trung giới thiệu các loại động cơ có sử dụng Encoder.
Động cơ servo là loại động cơ được dùng trong điều khiển máy móc bằng cơ cấu servo, đó là một cơ cấu điều khiển chính xác góc quay và quãng đường chuyển động của một vòng điều khiển bằng cách giữ không đổi tốc độ của các chuyển động quay hoặc chuyển động thẳng liên tục. Động cơ servo thường được cấu thành từ tổ hợp ba thành phần: động cơ xoay chiều hoặc động cơ một chiều, Encoder và bộ khuếch đại servo (còn được gọi là bộ điều khiển servo).
Để giữ tốc độ quay của động cơ một chiều không chổi than hoặc động cơ xoay chiều không đổi, chúng ta sử dụng Encoder làm cảm biến tốc độ quay. Sau đó, bộ khuếch đại servo sẽ điều khiển sao cho nếu tốc độ quay chậm hơn tốc độ đặt thì sẽ làm động cơ quay nhanh hơn và ngược lại. Ngoài ra, để điều khiển chính xác góc quay của động cơ, người ta cũng sử dụng Encoder làm cảm biến góc quay. Vừa đánh giá xem đã di chuyển đến góc quay mục tiêu hay chưa, vừa điều khiển để đến được góc quay mục tiêu đó. Phương pháp vừa điều khiển vừa đánh giá tốc độ và góc quay của động cơ bằng Encoder như vậy được gọi là phương pháp điều khiển phản hồi (phương pháp điều khiển vòng kín).
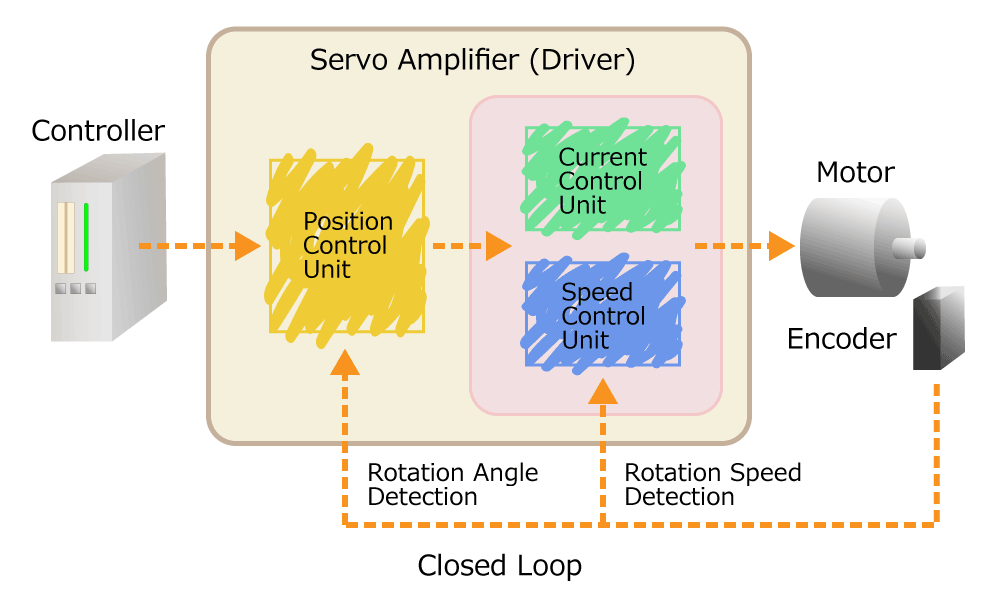
Hình 5. Sơ đồ điều khiển động cơ servo
Động cơ bước
Một loại động cơ khác là động cơ bước. Động cơ bước là động cơ quay theo một góc không đổi mỗi khi có 1 tín hiệu xung đầu vào. Vì động cơ bước xác định góc quay và tốc độ của động cơ bằng số lượng tín hiệu xung đầu vào cấp cho động cơ và khoảng thời gian giữa các xung, vì vậy thích hợp sử dụng phương pháp điều khiển không có phản hồi (phương pháp điều khiển vòng hở) cũng được sử dụng. Phương pháp này có đặc điểm là không sử dụng Encoder, vì vậy hệ thống có thể được đơn giản hóa.
Tuy nhiên, động cơ bước có nhược điểm là hiệu suất động cơ kém dần do cường độ dòng điện luôn phải là cực đại để ngăn hiện tượng trượt bước. Vì thế, bằng cách thực hiện điều khiển phản hồi nhờ sử dụng Encoder để kiểm tra xem động cơ có quay đúng như yêu cầu hay không, không cần thiết phải duy trì cường độ dòng điện cực đại chạy trong động cơ và hệ thống có thể giảm tải tiêu thụ năng lượng.
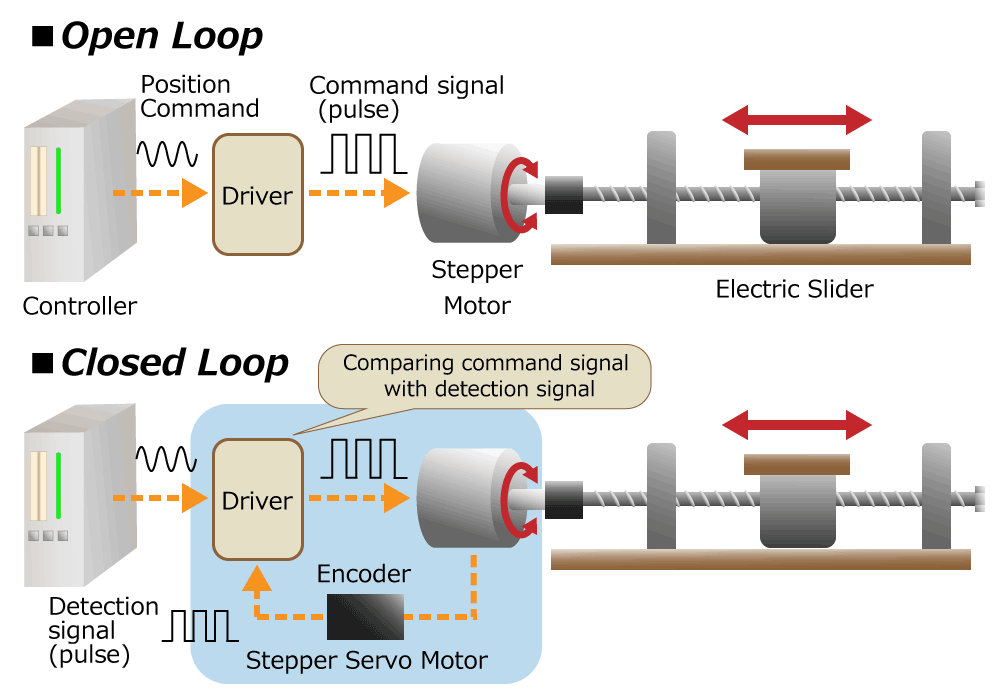
Hình 6. Sơ đồ điều khiển vòng hở và vòng kín động cơ bước
Ngoài ra, bằng cách nắm bắt trạng thái phụ tải bằng Encoder, có thể tối đa hóa tốc độ thao tác của cơ cấu chấp hành trong phạm vi mà động cơ không bị trượt bước, và hiệu suất công việc sẽ được cải thiện. Động cơ bước được sử dụng theo cách này còn được gọi là động cơ servo bước.
Tổng kết
- Encoder là một cảm biến nhận biết góc quay và chuyển vị tuyến tính.
- Encoder được sử dụng trong các thiết bị cần vận hành với đáp ứng nhanh và độ chính xác cao.
- Điều khiển phản hồi là phương pháp vừa điều khiển vừa sử dụng Encoder để xác định tốc độ và góc quay của động cơ.
Trong bài viết này, chúng tôi đã giới thiệu một cách cơ bản đến các bạn vai trò và ứng dụng của Encoder. Các bạn hẳn cũng đã thấy được rằng Encoder đang được sử dụng rất rộng rãi.
Lần tới, chúng tôi sẽ giải thích về cách thức hoạt động của Encoder.
Hẹn gặp lại!
Tác giả: Đinh Văn Hòa
Nguồn: https://www.akm.com/jp/ja/products/rotation-angle-sensor/tutorial/role-encoder/






0 Bình luận