 ️
️Làm Thế Nào Để Tăng Tốc Độ Chuyển Động Lên 2 Lần Trong Thiết Bị Vận Chuyển Sử Dụng Vít Me?
- 2022-02-27
- THIẾT KẾ- CHẾ TẠO MÁY
- 20 phút đọc
XTMechanical Blog xin chào các bạn. Thông qua 7 bài viết trước, chúng tôi đã gửi tới các bạn phương pháp thiết kế cơ cấu gắp và thả vật P&P sử dụng vít me. Bắt đầu từ bài viết này, chúng tôi sẽ hướng dẫn các bạn cách sử dụng thiết bị khi gặp các bài toán thực tế trong các tình huống cụ thể, “Với trường hợp này, thì làm thế nào?”. Hôm nay, chúng ta sẽ xem xét tình huống “Trong thiết bị vận chuyển có dùng vít me, làm thế nào để tăng tốc độ chuyển động lên 2 lần”.

Thực tế khi thiết kế sẽ thường gặp những yêu cầu về việc thay đổi tốc độ để phù hợp kế hoạch sản xuất hoặc khi cần cải tiến thiết bị, vì vậy chúng ta cũng cần phải tính toán thiết kế cho những trường hợp như vậy. Cùng nhìn vào hình 1 dưới đây là thiết bị vận chuyển mà ta đã thiết kế từ đầu tới giờ.
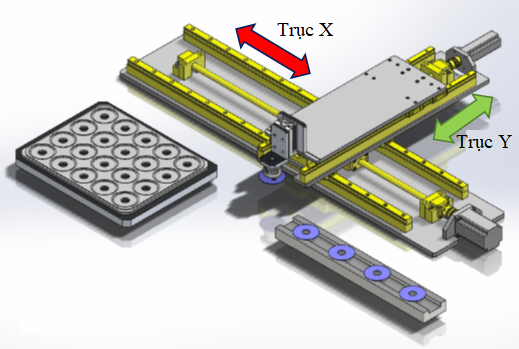
Hình 1. Thiết bị vận chuyển với truyền động vít me (cơ cấu P&P)
Muốn tăng tốc độ chuyển động của trục X cách đơn giản và thông thường nhất là thay đổi tốc độ cài đặt của động cơ bằng phần mềm. Tuy nhiên như yêu cầu ở tiêu đề, tăng lên 2 lần là một bài toán khó giải quyết được nếu như phần cứng không đáp ứng được và trong trường hợp này ta cần phải cải tiến hoặc thay đổi chúng. Và đương nhiên, khi thay đổi phần cứng thì chi phí sẽ phát sinh cao hơn và có thể nảy sinh thêm một số vấn đề liên quan đến độ chính xác của hệ thống. Trên tinh thần giới thiệu với bạn đọc một cách nhìn nhận và những tính toán cơ bản liên quan đến vít me, bài viết này sẽ đề cập đến những thay đổi liên quan đến phần cứng là vít me.
Trước hết, chúng ta hãy cùng nhìn lại các thông số kĩ thuật thiết bị được yêu cầu.
Bảng 1. Thông số cơ bản của thiết bị
|
Tên gọi thiết bị |
Cơ cấu gắp và thả vật P&P |
|
|
Đối tượng vận chuyển |
Vật |
Kích thước Φ63.5×Φ19.05×t1.0 Khối lượng W=0.008kg |
|
Tốc độ vận chuyển |
Cả 2 trục X,Y |
250mm/s |
|
Quãng đường chuyển động |
Trục X |
680mm |
|
Trục Y |
210mm |
|
|
Trục Z |
20mm |
|
|
Độ chính xác vị trí |
Cả 2 trục X,Y |
±0.05mm/500mm |
- Khối lượng tải (khối lượng vận chuyển): 11.1kg
- Vít me (mã sản phẩm BSS1505-900, nhà sản xuất Misumi):
Đường kính trục vít 15mm, chiều dài 900mm, bước ren 5mm
- Khớp nối trục (mã sản phẩm CPDW32-10-11, nhà sản xuất Misumi):
Mô men xoắn cho phép = 2.5 Nm, tốc độ quay cực đại = 19000 rpm
Mô men quán tính = 0.096×10-4 kgm2
- Động cơ servo AC (Công suất 200W, tốc độ quay 3000min-1):
Mô men xoắn định mức = 0.637 Nm, mô men xoắn cực đại = 2.23 Nm
Mô men quán tính động cơ = 0.259×10-4 kgm2
Tỉ số men quán tính cho phép ≤ 15 lần (so với giá trị trên)
Mục lục
1. Phương pháp thay đổi tốc độ chuyển động
2. Tính toán mô men xoắn tải
3. Tính toán mô men xoắn tăng tốc
4. Lựa chọn động cơ
5. Tổng kết
Và sau đây chúng ta sẽ đi vào từng phần chi tiết.
1.Phương pháp thay đổi tốc độ chuyển động
Để thay đổi tốc độ trong thiết bị sử dụng vít me, phương pháp cơ bản là tăng bước ren của vít me. Nhờ đó, lượng chuyển động trên mỗi vòng quay của động cơ cũng sẽ nhiều lên và có thể làm tăng tốc độ chuyển động lên.
Ngoài ra, còn một phương pháp khác là tăng tốc độ quay của động cơ. Tuy nhiên, vì hiện tại động cơ vận hành với tốc độ quay nhỏ hơn tốc độ định mức, nên phương pháp này yêu cầu tốc độ sau khi thay đổi không lớn hơn tốc độ định mức. Ta sẽ xem thử phương pháp này dưới đây.
Đầu tiên, ta sẽ tính toán tốc độ hiện tại qua tốc độ quay động cơ và bước ren của trục vít. Vì trong thiết bị không sử dụng bộ giảm tốc nên tốc độ vận chuyển có thể được tính theo công thức sau:

Do đó:

Ta sẽ tính được tốc độ vận chuyển hiện tại là 250mm/s
Như vậy, máy vận hành với tốc độ quay động cơ định mức thì sẽ cho ra tốc độ vận chuyển yêu cầu, vì vậy để tăng tốc độ vận chuyển ta cần phải chọn phương pháp tăng bước ren của trục vít me. Với cùng đường kính trục, nhà sản xuất thường đưa ra các dòng sản phẩm trục vít với bước ren như là "bước ren tiêu chuẩn" và "bước ren lớn". Như trong catalog, loại trục vít ta chọn có các bước ren là 5mm và 10mm. Hiện tại ta đang dùng loại 5mm, nên ta sẽ thay đổi sang loại 10mm.

Hình 2. Bản vẽ kích thước trục vít
Do đó, ta sẽ có tốc độ vận chuyển tăng lên 2 lần sau khi thay đổi.

Tuy nhiên, đến đây chưa phải là ta đã thiết kế xong, mà tiếp theo còn phải tính tới nhiều yếu tố khác.
2. Tính toán mô men xoắn tải
Với việc thay đổi bước ren của vít me, mô men xoắn tải và mô men xoắn tăng tốc sẽ thay đổi theo. Ta sẽ hình dung sự thay đổi bước ren như hình dưới đây.
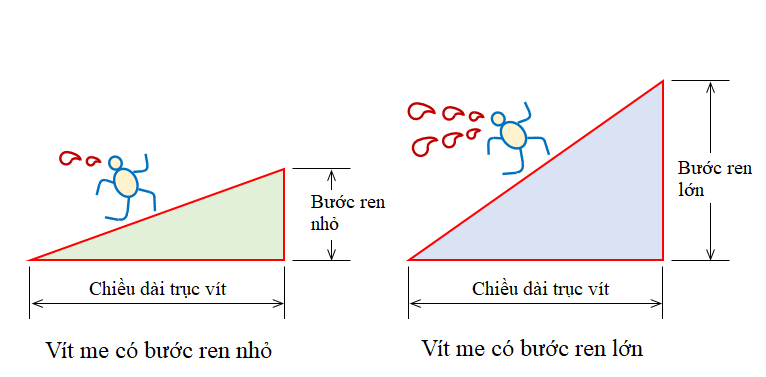
Hình 3. Hình ảnh minh họa về sự thay đổi bước ren
Độ dài trục ngang (chiều dài vòng ngoài của vít) là không thay đổi, còn độ dài trục đứng (bước ren) đã tăng lên 2 lần. Chỉ mới như vậy, đoạn dốc đã thay đổi một cách đáng kể, làm cho phải “mất nhiều sức” (mô men xoắn) hơn.
Mô men xoắn tải được tính theo công thức dưới đây:

Mô men ngoại lực có thể là mô men do trọng lực tác dụng lên trục nâng hoặc lực cản cắt của máy gia công. Mô men tải ma sát có thể là mô men gây ra bởi ma sát của thanh dẫn, vít me, phớt…
Trước hết, với mô men ngoại lực, vì thiết bị vận chuyển theo phương ngang nên không chịu tác dụng của trọng lực. Ngoài ra, vì không có các lực cản cắt, nên không cần tính đến.
Trong trường hợp tính đến mômen ngoại lực, công thức của nó như sau:

Tiếp theo, chúng ta sẽ tính mô men tải ma sát. Những bộ phận có thể là tải ma sát, đó là các thanh dẫn hướng và trục vít me. Hệ số ma sát của thanh dẫn hướng là khoảng ±0.003 (có thể lớn hơn tùy thuộc vào điều kiện tải trọng đặt trước). Vì rất khó để tính toán cho vít me theo hệ số ma sát, nên ta sẽ tính toán theo hiệu suất cơ học. Hiệu suất của vít me là khoảng ±95% nhưng thường được tính là ±90% trong thiết kế thực tế. Ta sẽ có công thức tính mômen phụ tải ma sát như sau:

Thay số vào ta được:

Suy ra được mô men xoắn tải:

Như đã tính toán ở trên, trong trường hợp vận chuyển theo phương ngang, với tổ hợp thanh dẫn hướng và vít me thì mô men xoắn tải gần như bằng không, vậy nên nếu khối lượng phụ tải không lớn thì có thể bỏ qua mô men xoắn tải khi thiết kế.
3. Tính toán mô men xoắn tăng tốc
Với việc thay đổi bước ren lớn hơn của vít me, trong một vòng quay của trục vít thì lượng dịch chuyển của đai ốc sẽ được tăng lên đồng nghĩa với việc chúng ta cần tác dụng một mô men xoắn lớn hơn. Công thức tính mô men xoắn tăng tốc được tính như sau:
Mô men xoắn tăng tốc = Mô men xoắn gia tốc + Mô men xoắn tải (3.1)
Để tăng tốc, trước hết cần phải tác dụng thêm mômen xoắn gia tốc vào mô men xoắn tải đã tính được trước đó. Trong trường hợp vận chuyển ngang , mô men xoắn tải gần như bằng không như trong tính toán trên nên có thể được bỏ qua. Tuy nhiên, trong trường hợp vận chuyển theo phương thẳng đứng (bao gồm cả vận chuyển theo phương chéo) thì cần phải tính đến điều này. Trong trường hợp này là vận chuyển theo phương ngang, nên chúng ta sẽ chỉ tập trung vào mô men xoắn gia tốc.

Trông công thức xuất hiện đại lượng mô men quán tính. Chúng ta hãy cùng nhớ lại cách tính mô men quán tính của một số vật thể quen thuộc được cho bởi bảng dưới.
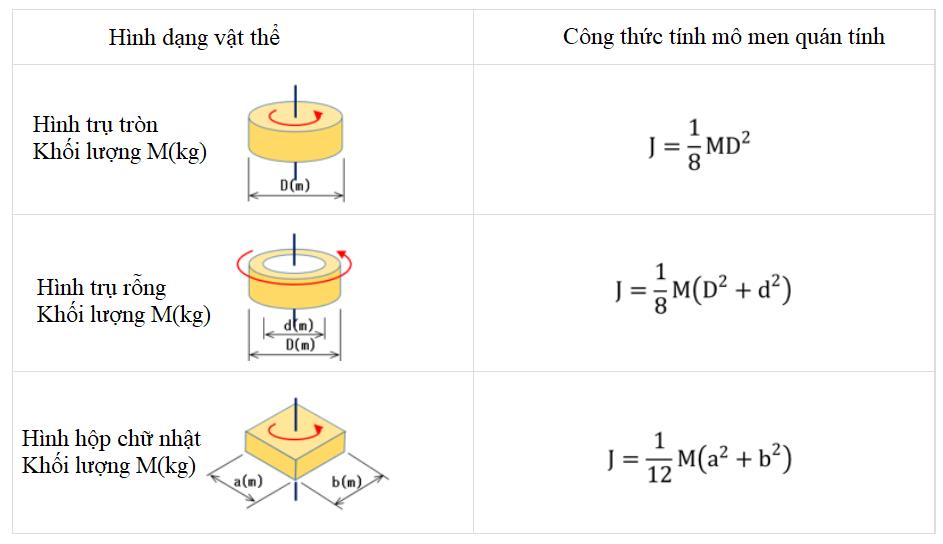
Bảng 2. Công thức tính mô men quán tính của một số vật thể
Trong cơ cấu gắp thả vật, mô men quán tính được liệt kê gồm những thành phần dưới đây:
① Mô men quán tính của bộ phận chuyển động
② Mô men quán tính của vít me
③ Mô men quán tính của khớp nối trục
④ Mô men quán tính của động cơ
Với ③ và ④ được cho trong catalog nên ta chỉ việc sử dụng chúng. Với ② mô men quán tính của vít me, chúng ta sẽ sử dụng kết quả đã tính ở bài viết “Lựa Chọn Động Cơ Servo Trong Thiết Kế Máy” do vít me có cùng đường kính trục. Như vậy ta chỉ cần tính toán mỗi ① Mô men quán tính của bộ phận chuyển động nữa là xong:

Tóm tắt lại ta được:
|
No. |
Tên bộ phận |
Mô men quán tính (×10-4 kg・m2) |
|
① |
bộ phận chuyển động |
0.141 |
|
② |
vít me |
0.348 |
|
③ |
khớp nối trục |
0.096 |
|
④ |
động cơ |
0.259 |
|
|
Tổng |
0.844 |
Để tính mô men gia tốc ở công thức (3.2) ta sử dụng thêm các dự kiện:
- Tốc độ động cơ: 3000min-1
- Thời gian tăng tốc 0.2s (vẫn giữ nguyên như lúc chưa thay đổi vận tốc)
Ta có:

Thay vào công thức (3.1) ta được:

Trong mô men xoắn tăng tốc ta thấy mô men xoắn tải chỉ chiếm một thành phần rất nhỏ, điều này là do việc sử dụng thanh dẫn hướng.
4. Lựa chọn động cơ
Sau khi tính toán được mô men xoắn tăng tốc, chúng ta sẽ đi lựa chọn động cơ. Động cơ hiện tại có các thông số như sau:
- Công suất trục định mức = 200W, tốc độ định mức 3000min-1
- Mô men xoắn định mức = 0.637Nm
- Mô men xoắn cực đại = 2.23 Nm
- Mô men quán tính của động cơ = 0.259×10-4 kg・m2
- Tỉ số mô men quán tính cho phép của động cơ dưới 15 lần
Do mô men xoắn tăng tốc tính toán được bé hơn mô men xoắn định mức của động cơ nên ở đây chúng ta không cần lựa chọn động cơ mới (trong trường hợp mô men xoắn tăng tốc cao hơn mô men xoắn định mức của động cơ hiện tại, chúng ta sẽ đối chiếu với catalog để chọn động cơ mới). Trong thiết kế, việc lựa chọn động cơ thường tuân theo các điều kiện sau:
① Mô men xoắn định mức phải lớn hơn mô men xoắn tăng tốc
② Tỉ số mômen quán tính nhỏ hơn hoặc bằng tỉ số mômen quán tính cho phép của động cơ
Thông thường thì nếu điều kiện ① được thỏa mãn thì điều kiện ② cũng được thỏa mãn. Lần này, mô men xoắn tăng tốc chỉ bằng khoảng 1/3 mô men xoắn định mức nên chúng ta không tính toán điều kiện ②.
Trong trường hợp mô men xoắn tăng tốc xấp xỉ gần bằng hoặc vượt quá một chút so với mô men xoắn định mức thì điều kiện ② cần được tính toán và xác nhận lại. Lúc đó, mô men xoắn tải hiệu dụng cũng cần được tính toán và để xác nhận rằng mô men xoắn tải hiệu dụng nhỏ hơn hoặc bằng mô men xoắn định mức của động cơ. Trong một số trường hợp, có thể cần phải chọn điện trở tái sinh.
Trong trường hợp mô men xoắn tăng tốc vượt quá mô men xoắn định mức của động cơ rất nhiều thì cần phải tăng công suất động cơ. Tính toán lại mô men xoắn tăng tốc với động cơ mới và xem xét lại điều kiện ① và ②.
Trên thực tế, ở điều kiện ② khi tỉ lệ mô men quán tính bị vượt quá thì động cơ vẫn có thể quay. Tuy nhiên về mặt điều khiển động cơ thì lại gặp khó khăn. Nói cách khác, tỉ lệ mô men quán tính cho phép là phạm vi bắt buột để bộ Driver có thể điều khiển được động cơ chính xác.
5. Tổng kết
Thông qua nội dung bài viết, khi thay đổi tốc độ trong thiết bị vận chuyển dùng vít me thì chúng ta cần lưu ý những điểm sau:
- ① Chỉ xem xét tốc độ động cơ và bước ren vít me là chưa đủ
- ② Khi bước ren vít me thay đổi thì mô men quán tính của bộ phận chuyển động cũng thay đổi kéo theo mô men xoắn tăng tốc cũng thay đổi.
Điều này có nghĩa là ngay cả khi lựa chọn được vít me (bước ren) và động cơ (tốc độ quay) thỏa mãn tốc độ mục tiêu thì chúng ta cần phải xem xét thêm mô men quán tính, mô men tăng tốc.
Ở bài viết tiếp theo, chúng ta sẽ xem xét trong trường hợp cơ cấu gắp thả vật vận chuyển vật theo phương nằm ngang sẽ được thay đổi theo hướng thẳng đứng. Mời các bạn đón đọc nhé, hẹn gặp lại.
Tác giả: Đinh Văn Hòa
Nguồn: ボールネジを使った搬送装置の移動速度を2倍にするには?







0 Bình luận