 ️
️Robot 6 trục là gì? Giải thích chi tiết hệ tọa độ và các phương pháp dạy robot
- 2025-12-16
- THIẾT KẾ- CHẾ TẠO MÁY
Trong lĩnh vực công nghiệp, việc vận hành sản xuất trong nhà máy với tiền đề là áp dụng robot 6 trục đang ngày càng được triển khai. Kích thước và chức năng của robot cũng được chế tạo ưu việt để phù hợp với ngành nghề và nội dung công việc của từng lĩnh vực. Tuy nhiên, thực tế cho thấy việc đưa robot vào sử dụng không hề dễ dàng. Tất nhiên, rào cản lớn nhất là chi phí đầu tư, nhưng vấn đề quan trọng khác chính là lập trình.

1. Lời mở đầu
Robot là một thiết bị thông minh, nhưng nếu không có chương trình khai thác và tối ưu được các chức năng – nguồn gốc tạo nên “sự thông minh” đó – thì robot cũng chỉ là đống sắt vụn. 😊
Ngày nay, robot được yêu cầu phải làm được những gì mà người thợ lành nghề có thể làm. Vì robot được đưa vào để thay thế người vận hành, điều này là hoàn toàn hiển nhiên.
Để làm được những việc giống con người, robot cũng phải có mức độ chức năng cao hơn, và việc đưa vào sử dụng robot có 6 hoặc 7 bậc tự do đã trở thành điều bình thường.
Vấn đề đặt ra ở đây là liệu có thể dễ dàng khiến robot có 6 bậc tự do thay thế con người hay không. Đó là lý do các phương pháp “dạy” robot (robot teaching) – nhằm đào tạo robot trở thành “người vận hành lành nghề” – được ra đời.
Trong bài viết này, chúng tôi sẽ giới thiệu về kỹ thuật teaching, tập trung vào robot 6 trục.
2. Robot 6 trục là gì
Hình 1 giới thiệu về số bậc tự do.
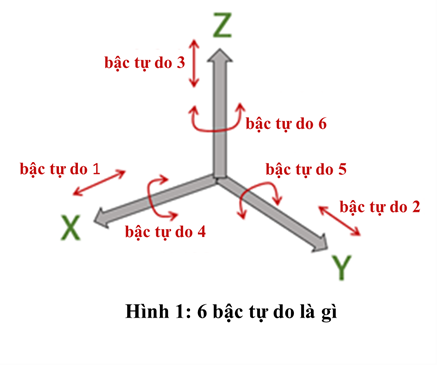
Không gian làm việc trong nhà máy là không gian ba chiều. Khi biểu diễn vị trí và tư thế của một vật thể trong không gian 3 chiều bằng hệ tọa độ trực giao, ta có: 1 bậc tự do theo phương trục X, 1 bậc tự do theo trục Y, 1 bậc tự do theo trục Z, và thêm 1 bậc tự do quay quanh trục X, 1 bậc tự do quay quanh trục Y, 1 bậc tự do quay quanh trục Z — tổng cộng là 6 bậc tự do.
Do đó, nếu robot công nghiệp có 6 bậc tự do, thì bất kỳ công việc nào trong nhà máy đều có thể được thực hiện trong không gian 3 chiều bằng cách điều khiển vị trí và tư thế.
Hình 2 giới thiệu robot có 6 bậc tự do.

Robot được giới thiệu trong Hình 2 là robot khớp kiểu đứng bậc tự do (vertically articulated robot). Trục quay được gọi là khớp (joint) và phần nối giữa các khớp được gọi là liên kết (link). Tại đầu robot, một cơ cấu chấp hành cuối được gắn vào để xử lý phôi.
Các dạng xử lý bao gồm:
- Gắp giữ và di chuyển vật
- Phun sơn
- Hàn bằng đồ gá hàn
Và nhiều ứng dụng đa dạng khác.
3. Teaching (Dạy robot) là gì
Để vận hành robot công nghiệp, cần phải tạo ra chương trình chuyển động phù hợp với từng công việc. “Teaching” — đúng như nghĩa của nó là “dạy” — tức là cho robot ghi lại các chuyển động thao tác.
Robot về cơ bản hoạt động theo các chuyển động đã được ghi nhớ thông qua quá trình teaching. Điều này giống với việc nhân viên kỳ cựu hướng dẫn quy trình công việc cho nhân viên mới. Con người ghi nhớ quy trình trong đầu, còn robot thì ghi lại chi tiết từng bước hoạt động, từng tọa độ vào bộ nhớ.
Hình 3 minh họa về teaching.

Để tự động hóa và nâng cao hiệu quả trong nhà máy, không chỉ robot mà cả các thiết bị tự động như máy gắp – đặt linh kiện cũng được triển khai. Điều chúng ta kỳ vọng ở robot là có thể làm việc giống con người.
(1) Bên trái Hình 3
Phần bên trái Hình 3 giả định rằng chỉ mới đưa robot vào nhà máy. Dù đã lập trình các chuyển động cơ bản để robot hoạt động, nhưng ở mức này, robot vẫn không thể đảm nhiệm công việc trên dây chuyền sản xuất.
(2) Phần giữa Hình 3
Tiếp theo, cần phải lập trình để robot biết thực hiện công việc như thế nào — đây chính là teaching. Teaching có nhiều phương pháp như online, offline, direct teaching,… Ở đây giả định dùng phương pháp dạy trực tiếp (direct teaching), tức là con người hướng dẫn robot tại chỗ.
Như trong hình ở giữa, nếu ta dạy robot một thao tác, ví dụ “xoay cánh tay 45° sang phải”, thì robot sẽ ghi lại toàn bộ: trạng thái trước khi xoay, trạng thái sau khi xoay, và cả quá trình xoay.
(3) Bên phải Hình 3
Khi toàn bộ công việc được dạy và kết quả được lập trình – ghi lại đầy đủ, robot có thể hoạt động như một robot tác vụ. Ở trạng thái mô tả bên phải Hình 3, toàn bộ công việc được giao hoàn toàn cho robot thực hiện.
4. Phương pháp robot xử lý sản phẩm (work)
Hãy xem robot tác vụ sẽ hoạt động như thế nào trong hai tình huống khác nhau khi được đưa vào dây chuyền sản xuất.
(1) Trường hợp sản phẩm (work) di chuyển ở vị trí cố định
Hình 4 mô tả thao tác robot gắp work đang di chuyển trên băng chuyền.
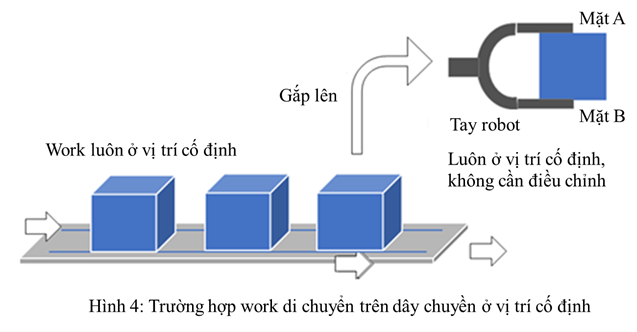
Giả sử work trên băng chuyền luôn được đặt ở vị trí cố định. Vai trò của robot là lần lượt gắp từng work và chuyển đến vị trí quy định.
Trong quá trình teaching, robot được dạy cách nhận biết mặt A và mặt B của work, dùng lực kẹp phù hợp tại đầu tay robot để gắp work lên.
Ngoài lập trình, điều quan trọng khi robot làm việc là phải trang bị đầy đủ chức năng cảm biến. Trong trường hợp này, robot cần:
- Xác nhận work đang ở đúng vị trí quy định
- Nhận diện được mặt cần kẹp
- Không kẹp quá mạnh gây hỏng work
- Cũng không kẹp quá nhẹ khiến work trượt và rơi
(2) Trường hợp vị trí work thay đổi theo từng lần
Hình 5 mô tả cùng thao tác gắp work như Hình 4, nhưng khác ở chỗ: work ở các vị trí khác nhau, không cố định.

Do vị trí work thay đổi, robot không thể chỉ việc hạ tay xuống vị trí cố định như trong Hình 4. Vì vậy, robot thực hiện theo các bước sau:
- Robot xác định vị trí mặt A và mặt B của work.
- Ví dụ, robot đánh giá rằng nếu xoay cánh tay 25° sang phải theo hướng Y và nâng lên 10° theo trục Z thì có thể gắp được work.
- Dựa trên đánh giá đó, robot tính toán mỗi trục cần di chuyển bao nhiêu từ vị trí hiện tại.
- Đưa cánh tay robot đến đúng vị trí.
- Gắp work.
- Với từng work tiếp theo, robot cũng tính toán tương tự để thực hiện thao tác gắp.
Tất cả những hoạt động này đều dựa trên chương trình đã được teaching.
5. Ví dụ về teaching cho robot 6 trục
Ở các ví dụ trước đã trình bày robot tác vụ thực hiện nhiệm vụ gắp từng phôi trên dây chuyền. Với mức công việc như vậy, robot chỉ cần 3–4 bậc tự do là có thể đáp ứng đầy đủ, và chi phí cũng không quá lớn. Vậy robot 6 trục được ứng dụng như thế nào?
(1) Khi work có nhiều hình dạng khác nhau trên dây chuyền
Dây chuyền trong Hình 6 cũng là thao tác gắp work giống như các ví dụ trước.
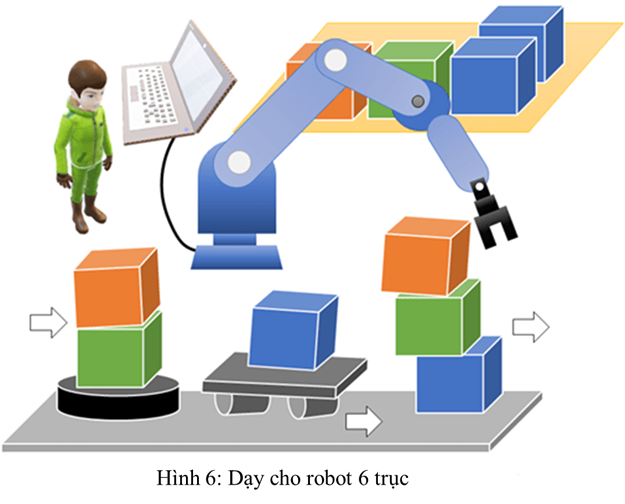
Tuy nhiên, ở trường hợp này, work có nhiều dạng khác nhau khi được đưa đến:
- Work được xếp chồng vài cái
- Work được đặt trên xe đẩy
- Work xếp chồng nhiều cái trên một bệ đỡ
Với kiểu work như vậy, robot phải nhận biết được chiều cao và điều chỉnh theo độ cao đó. Ngoài ra, ở độ cao đó, robot cần bổ sung các điều chỉnh xoay theo trục X, Y, Z.
Robot phù hợp nhất cho kiểu công việc này chính là robot có 6 bậc tự do.
(2) Teaching cho robot 6 trục
Một số nội dung teaching điển hình cho robot 6 trục có thể gồm:
- Di chuyển tay robot đến đúng độ cao của work
- Phát hiện vị trí work và di chuyển đến vị trí kẹp
- Nhận diện mặt kẹp A hoặc mặt B
- Kẹp work tại mặt A/B và tiến hành gắp
- Di chuyển tay robot đến vị trí đặt work
- Ở mọi thao tác di chuyển, đảm bảo không gây nguy hiểm cho môi trường xung quanh
- Tính toán và ghi lại hành trình tối ưu (đường đi ngắn nhất) cho từng chuyển động
(3) Lưu ý khi teaching robot 6 trục
Robot 6 trục có thể ứng dụng vào hầu hết mọi công việc trong nhà máy, nên là loại robot được nhiều doanh nghiệp mong muốn áp dụng. Tuy nhiên, việc có 6 trục đồng nghĩa với việc mỗi trục, liên kết, cùng nhiều loại cảm biến và động cơ phải hoạt động phối hợp.
Do đó, để hoàn thành một công việc, robot phải thực hiện số lượng lớn các chuyển động lặp lại. Trong teaching, từng chuyển động đều phải được lập trình và ghi lại tất cả dữ liệu liên quan.
Nói cách khác, công việc teaching rất vất vả và tốn nhiều thời gian. Ngược lại, khi hoàn tất, toàn bộ công việc có thể giao cho robot, góp phần nâng cao hiệu quả sản xuất trong nhà máy.
XTMechanical Blog xin cảm ơn mọi người vì đã luôn dành thời gian, tình cảm cho chúng mình! Thông qua bài viết, chúng mình hy vọng có thể lan toả niềm đam mê và tiếp thêm động lực, kiến thức cho mọi người. Cuối cùng, dù bao nhiêu khó khăn, xin chúc bạn luôn vững bước và thành công trên chính con đường mình đã chọn!
Tác giả: Nguyễn Văn Hoà
Chu Văn Minh






0 Bình luận