 ️
️[BÀI VIẾT SỐ 6] SAI SỐ GÓC CỦA ENCODER TỪ
- 2023-09-24
- TỰ ĐỘNG HÓA
- 17 phút đọc
XT Mechanical Blog xin chào các bạn. Hôm nay chúng tôi sẽ giới thiệu bài viết số 6 trong chuỗi bài viết "Kiến thức cơ bản về Encoder". Nối tiếp nội dung bài viết trước về Encoder từ, ở bài viết này chúng tôi sẽ đề cập tới sai số của nó.

Mục lục
6-1. Nguyên nhân xuất hiện sai số góc ở Encoder từ
6-2. Phương pháp làm giảm thiểu sai số góc ở Encoder từ
Nào chúng ta hãy cùng bắt đầu.
6-1. Nguyên nhân xuất hiện sai số góc ở Encoder từ
Trong cách bố trí Shaft-End, tâm của trục quay, nam châm vĩnh cửu và phần tử Hall thẳng hàng trên cùng một đường, hình Lissajous (đã đề cập ở bài viết số 5) về mặt lý tưởng sẽ là một đường tròn hoàn hảo và sai số phát hiện góc sẽ bằng 0. Tuy nhiên, trên thực tế, hình Lissajous có thể không phải là hình tròn hoàn hảo do một số yếu tố nào đó dẫn đến lỗi phát hiện góc. Và ở phần này chúng tôi sẽ giới thiệu các yếu tố dẫn đến lỗi điển hình.
Để thống nhất trong toàn bài viết và đơn giản trong việc diễn giải, chúng tôi sẽ chỉ để cập đến loại Encoder từ bao gồm một nam châm từ hóa hướng tâm và phần tử Hall phát hiện cường độ từ trường ngang.
Từ trường nhiễu
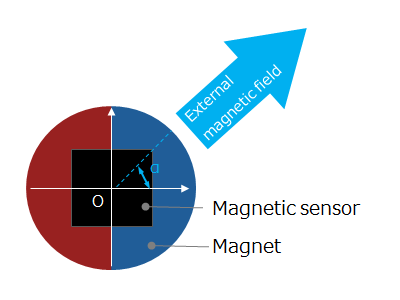
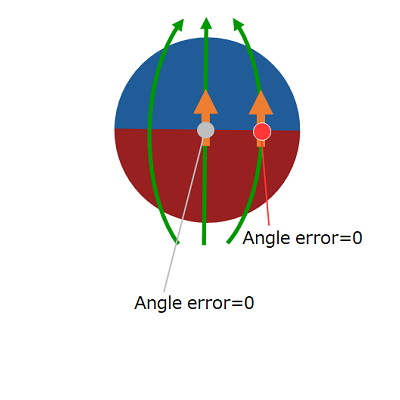
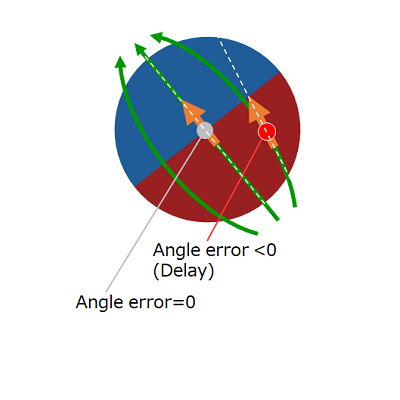
Sai số góc xảy ra do ảnh hưởng của nhiễu loạn từ trường đầu vào theo hướng ngang của nam châm vĩnh cửu. Ví dụ: nếu một từ trường nhiễu được đưa vào theo hướng trục X thì tâm của hình Lissajous sẽ bị lệch theo hướng trục X. Tuy sai số góc bằng 0 khi góc quay θ là 0° và 180°, nhưng sai số góc sẽ xuất hiện ở những thời điểm khác.
|
|
|
|
Hình 6-1a Từ trường nhiễu đầu vào theo hướng ngang của nam châm vĩnh cửu |
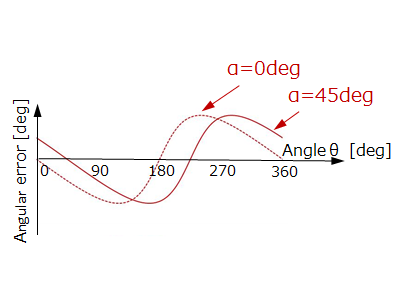
Hình 6-1b Lỗi góc xuất hiện khi đưa từ trường nhiễu đầu vào theo trục X |
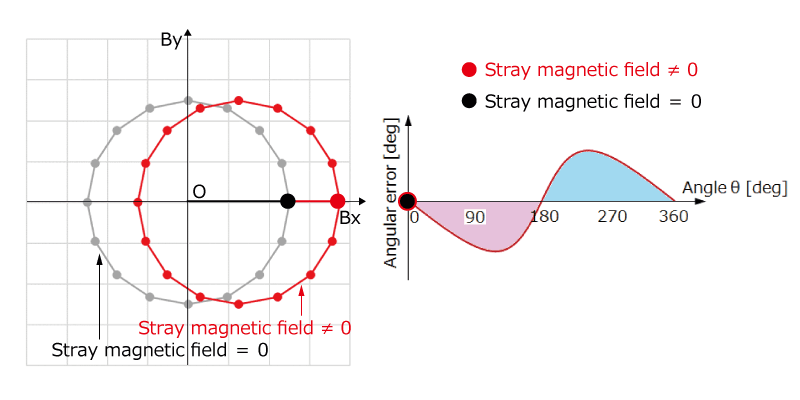
Hình 6-1c. Hình Lissajous và sai số góc khi từ trường nhiễu được đưa vào từ hướng 0°
Hình 6-1c thể hiện hình Lissajous và sai số góc khi đưa vào một từ trường nhiễu theo hướng trục X (α = 0°). Sai số góc bằng 0 khi góc quay θ là 0° hoặc 180°, góc pha trễ xuất hiện trong khoảng từ 0 đến 180° và góc pha tiến xuất hiện trong khoảng từ 180° đến 360°.
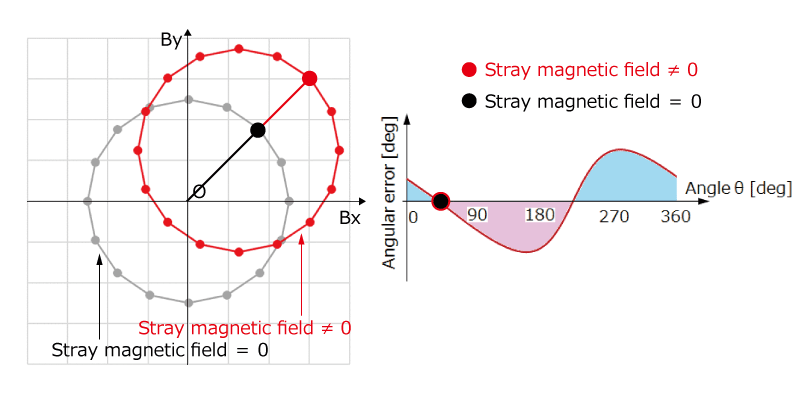
Hình 6-1d. Hình Lissajous và sai số góc khi từ trường nhiễu được đưa vào từ hướng 45°
Hình 6-1d thể hiện hình Lissajous và sai số góc khi đưa vào một từ trường nhiễu hướng α = 45°. Sai số góc bằng 0 khi góc quay θ là 45° hoặc 225°, góc pha trễ xuất hiện trong khoảng từ 45° đến 225°, và góc pha tiến trong khoảng từ 225° đến 45°.
Độ lệch trục của phần tử Hall lúc lắp đặt
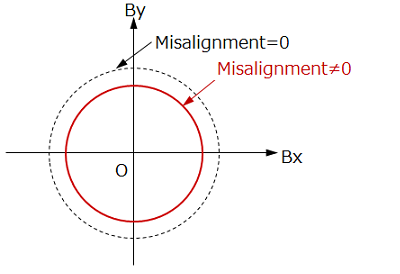
Lỗi góc xảy ra do lắp đặt phần tử Hall bị lệch trục. Do đó tâm của phần tử Hall và nam châm vĩnh cửu bị lệch dẫn đến từ trường đầu vào của phần tử Hall bị méo.
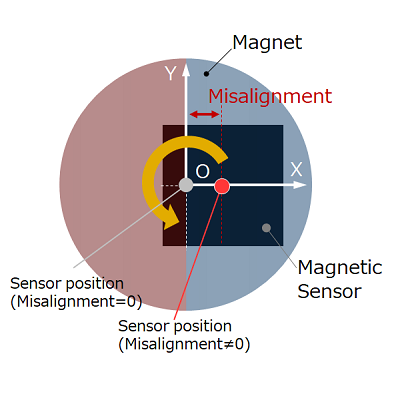
Hình 6-2a. Độ lệch trục của phần tử Hall
Ví dụ: khi phần tử Hall bị lệch theo hướng trục X, sai số góc bằng 0 khi góc quay θ là 0°, 90°, 180° và 270°, góc pha tiến trong khoảng từ 0~90° và 180~270 ° , góc pha trễ trong khoảng từ 90~180° và 270~0°.
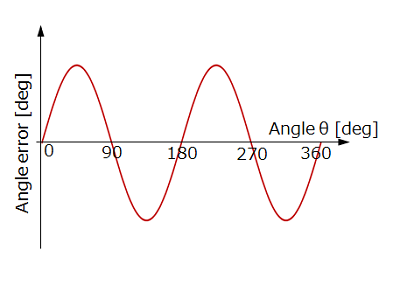
Hình 6-2b. Sai số góc khi lệch theo phương trục X
|
|
|
|
|
|
θ = 0° |
θ = 45° |
θ = 90° |
θ = 135° |
|
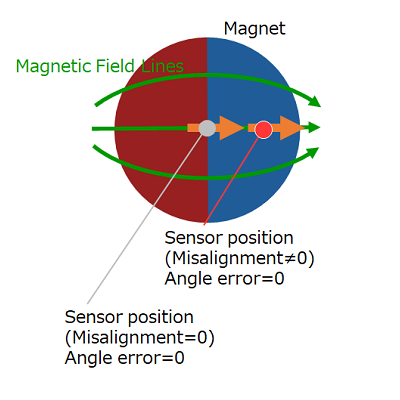
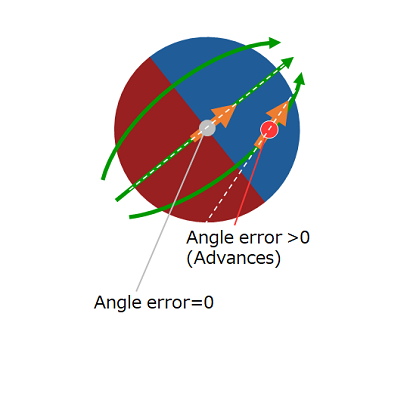
Hình 6-2c. Từ trường đầu vào phần tử Hall khi bị lệch theo hướng trục X (θ = 0°, 45°, 90°, 135°) |
|||
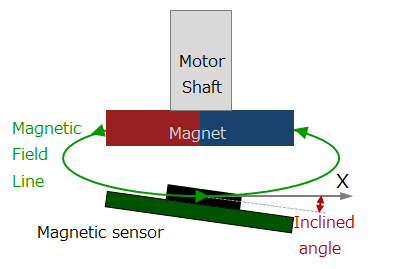
Độ nghiêng của phần tử Hall lúc lắp đặt
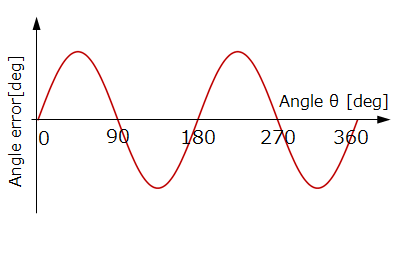
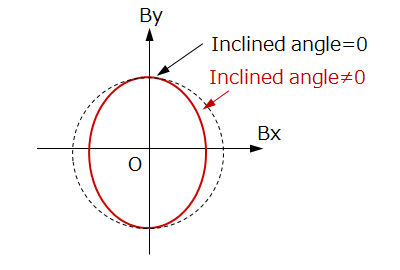
Lỗi góc xảy ra do phần tử Hall bị lắp nghiêng. Mặc dù tâm của phần tử Hall và nam châm vĩnh cửu không bị lệch, nhưng từ trường đi vào phần tử Hall từ hướng nghiêng trở nên yếu hơn, do đó hình Lissajous trở thành một hình elip. Ví dụ: nếu phần tử Hall nghiêng so với hướng trục X, thì từ trường đầu vào phần tử Hall sẽ yếu khi góc quay θ là 0° và 180°, nhưng không bị ảnh hưởng khi góc quay θ là 90° và 270° nên dạng sóng Lissajous trở thành hình elip có bán kính nhỏ theo hướng X. Sai số góc bằng 0 khi góc quay θ là 0°, 90°, 180° và 270°, góc pha tiến trong khoảng từ 0~90° và 180~270 °, góc pha trễ trong khoảng từ 90~180° và 270~0°.
|
|
|
|
|
Hình 6-3a. Phần tử Hall bị nghiêng theo phương trục X |
Hình 6-3b. Lỗi góc khi nghiêng theo phương trục X |
Hình 6-3c. Hình Lissajous khi nghiêng theo phương trục X |
Các nguyên nhân khác có thể là do trục nam châm vĩnh cửu bị lệch hoặc do nam châm vĩnh cửu bị nghiêng, nhưng trên thực tế sai số góc không xảy ra ngay cả khi trục nam châm vĩnh cửu bị lệch hoặc nghiêng. Điều này là do ngay cả khi nam châm quay với trục lệch, độ lớn của từ trường đưa vào phần tử Hall không thay đổi tùy theo góc, do đó hình Lissajous vẫn là một hình tròn hoàn hảo. Tuy nhiên, do cường độ của từ trường ngang được cảm biến từ Hall phát hiện trở nên nhỏ nên thành phần nhiễu trong góc phát hiện trở nên tương đối lớn.
|
|
|
|
Hình 6-4a. Trục nam châm vĩnh cửu bị lệch |
Hình 6-4b. Hình Lissajous khi nam châm vĩnh cửu bị lệch theo phương trục X |
Đặc tính không ổn định (sai số cố hữu) của các linh kiện cấu thành
Encoder từ được cấu tạo từ phần tử Hall và bộ chuyển đổi tương tự - số ADC (Analog-to-Digital Converter) là các linh kiện điện tử. Các linh kiện điện tử được sản xuất hàng loạt có những khác biệt riêng về đặc tính điện do sự không đồng nhất hoàn toàn 100% trong sản xuất. Ví dụ, tùy thuộc vào off-set của của phần tử Hall mà xuất hiện sai số góc tương tự như tác động của nhiễu từ trường. Nếu có sự khác biệt giữa độ nhạy của phần tử Hall phát hiện từ trường của thành phần trục X và thành phần trục Y thì hình Lissajous sẽ trở thành hình elip, tương tự như trong trường hợp độ nghiêng của phần tử Hall. Một cách tương tự, sự không đồng nhất off-set và độ nhạy của bộ chuyển đổi ADC cũng gây ra sai số góc.
6-2. Phương pháp làm giảm thiểu sai số góc ở Encoder từ
Trong cách bố trí Shaft-End, sai số góc bằng 0 khi hình Lissajous trở thành một đường tròn hoàn hảo. Tuy nhiên, đây chỉ là điều kiện lý tưởng và không thể sản xuất hàng loạt Encoder chỉ sử dụng các linh kiện điện tử mà không có từ trường nhiễu, không có độ lệch hoặc độ nghiêng lắp đặt của phần tử Hall hoặc không có sự biến đổi về độ lệch off-set hoặc độ nhạy. Thuật ngữ Robust (mạnh mẽ) là cái mà đề cập đến cơ chế hoặc đặc tính bên trong giúp hệ thống không bị thay đổi do những xáo trộn bên ngoài như sự thay đổi của môi trường. Để giảm thiểu sai số trong các Encoder từ sản xuất hàng loạt, cần thiết kế chúng có Robust cao. Nói cách khác, thiết kế sao cho các sai số góc khó có thể xảy ra ngay cả khi có từ trường nhiễu, lắp đặt sai lệch, lắp nghiêng và các biến đổi về đặc tính của các linh kiện điện tử có thể gây ra sai số.
Che chắn từ trường nhiễu
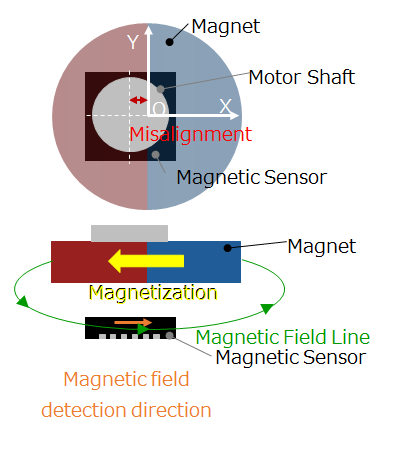
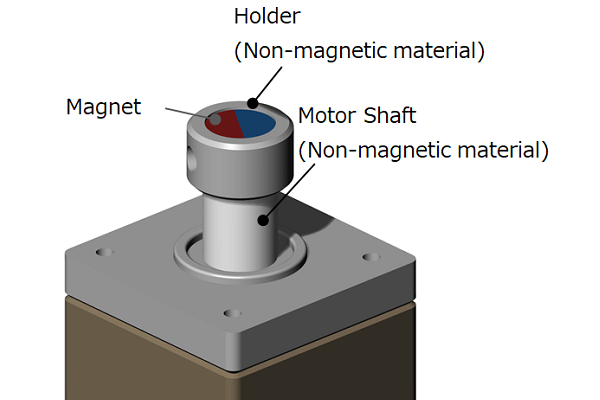
Bằng cách giữ những vật tạo ra từ tính (nam châm/nam châm điện) và những vật dễ dàng truyền từ tính (vật liệu từ tính) ra xa khỏi Encoder từ, ta có thể ngăn không cho từ trường đầu vào đến phần tử Hall bị biến dạng. Ví dụ, sẽ rất hiệu quả khi sử dụng vật liệu không có từ tính cho trục quay của động cơ hoặc đồ gá cố định nam châm vào trục quay (hình 6-5a). Ngoài ra, bằng cách che chắn khu vực xung quanh Encoder bằng vật liệu từ tính, có thể ngăn chặn tác động của từ trường nhiễu. Ví dụ, đối với các phần tử Hall phát hiện từ trường ngang, việc bao quanh chúng bằng một tấm chắn theo hướng ngang sẽ rất hiệu quả. Hơn nữa, bằng cách đặt phần tử Hall vào giữa nam châm vòng, bản thân nam châm vòng có tác dụng tương tự như một tấm chắn (hình 6-5b,c).
|
|
|
|
|
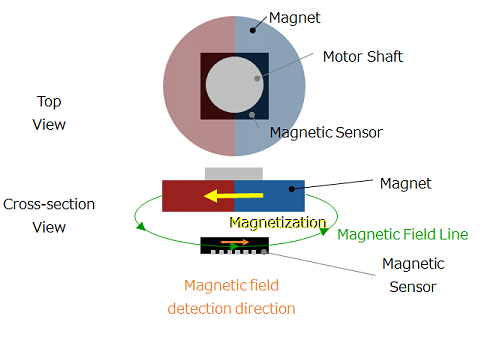
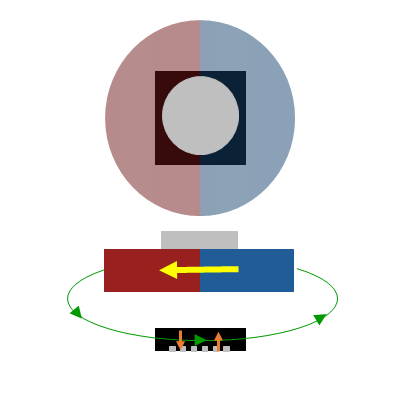
Hình 6-5a. Sơ đồ trục quay động cơ và nam châm |
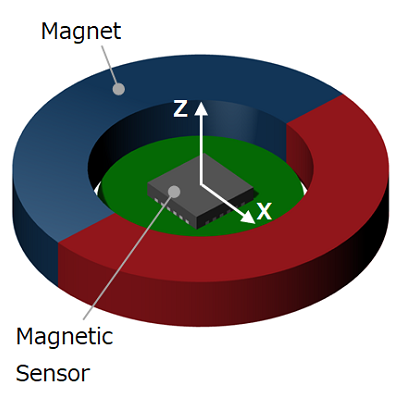
Hình 6-5b. Bố trí phần tử Hall vào giữa nam châm vòng |
Hình 6-5c. Phân bố từ trường khi phần tử Hall được đặt ở tâm vòng nam châm |
Giảm tác động của việc gắn sai lệch
|
|
|
|
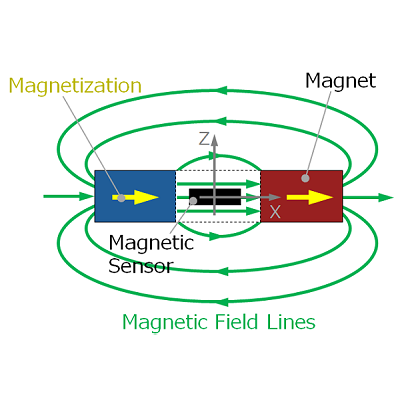
Hình 6-6a. Sự kết hợp giữa nam châm từ hóa hướng tâm và phần tử Hall phát hiện cường độ của từ trường ngang |
Hình 6-6b. Sự kết hợp giữa nam châm từ hóa hướng tâm và phần tử Hall phát hiện cường độ của từ trường thẳng đứng |
Như đã đề cập ở bài viết số 5, sự kết hợp giữa phần tử Hall phát hiện từ trường ngang và nam châm có từ trường đồng đều theo chiều ngang giúp giảm sai số góc do lệch trục gây ra (hình 6-6a).
Tăng cường từ trường đầu vào cho phần tử Hall
Thành phần tín hiệu đầu ra của phần tử Hall tỷ lệ thuận với cường độ của từ trường đầu vào. Mặt khác, vì các phần tử Hall có điện trở nên chúng có một lượng thành phần nhiễu nhất định bất kể cường độ của từ trường. Do đó, bằng cách tăng từ trường đầu vào phần tử Hall, tỷ lệ thành phần tín hiệu/thành phần nhiễu tăng lên và có thể giảm sai số góc do nhiễu gây ra.
Sử dụng cảm biến góc quay (IC) tích hợp đầy đủ các linh kiện điện tử
Do các phần tử Hall trục X và trục Y và bộ chuyển đổi ADC được gắn trên cùng một chip silicon (Si) nên các biến thể độ nhạy sẽ nhỏ hơn so với trong trường hợp các thành phần được kết hợp riêng lẻ, các đặc tính nhiệt độ và độ nhạy cũng nhất quán hơn. Do đó, có thể giảm sai số trong góc quay θ (xem bài viết số 5) tìm được bằng cách tính arctan (By/Bx).
Ngoài ra, off-set của phần tử Hall bị ảnh hưởng bởi sự dao động nhiệt độ do ứng suất từ nhựa epoxy bao bọc nó, nhưng bằng cách đặt phần tử Hall vào giữa “gói bao bọc hình vuông” để giảm thiểu ứng suất thì có thể giảm sai số do dao động nhiệt độ. Hơn nữa, bằng cách bố trí các chân của linh kiện ở bốn cạnh của “gói bọc hình vuông” này sẽ có hiệu ứng tự căn chỉnh giúp ngăn ngừa tình trạng lệch trục khi lắp lên bo mạch.
Ở bài viết này, chúng tôi đã giải thích sai số góc của Encoder từ. Hy vọng rằng bạn đã hiểu được nguyên nhân gây ra sai số góc và biện pháp khắc phục.
Trong bài viết tiếp theo cũng là bài viết cuối cùng trong chuỗi bài viết về Encoder, chúng tôi sẽ giải thích về Encoder từ có cách sắp xếp ngoài trục (off-axis). Hẹn gặp lại.
Tác giả: Đinh Văn Hòa
Nguồn: https://www.akm.com







0 Bình luận