 ️
️[BÀI VIẾT SỐ 3] ENCODER TƯƠNG ĐỐI VÀ ENCODER TUYỆT ĐỐI
- 2023-04-09
- TỰ ĐỘNG HÓA
XT Mechanical Blog xin chào các bạn.

Hôm nay chúng tôi sẽ giới thiệu đến mọi người bài thứ 3 trong chuỗi bài viết "Kiến thức cơ bản về Encoder".
Chúng tôi sẽ rất vui nếu như những nội dung sau đây giúp ích được cho các bạn. Những nội dung sau dành cho những bạn muốn học về Encoder, muốn hiểu nội dung công việc dù không trực tiếp làm về Encoder (ví dụ đối với các bạn thiết kế cơ khí) nhưng bộ phận khác trong công ty lại làm về Encoder.
Trong bài trước, chúng tôi đã giới thiệu nửa đầu nội dung về cách thức hoạt động của Encoder. Lần này, chúng tôi sẽ trình bày nội dung còn lại liên quan đến cách thức hoạt động của Encoder.
Mục lục
3-1. Chuyển động quay và góc quay được biểu hiện bằng tín hiệu điện như thế nào?
- Phương pháp Encoder tương đối mô tả góc quay tương đối
- Phương pháp Encoder tuyệt đối mô tả góc quay tuyệt đối
- Phương pháp Encoder tuyệt đối giả mô tả góc quay tuyệt đối bằng tín hiệu xung
3-2. Ưu điểm và khuyết điểm của góc quay tương đối và góc quay tuyệt đối
Nào chúng ta hãy cùng bắt đầu.
3-1. Chuyển động quay và góc quay được biểu hiện bằng tín hiệu điện như thế nào?
Trong bài viết số 2, chúng tôi đã trình bày về 4 loại thông tin cho chuyển động quay và góc quay. Có hai phương pháp để Encoder mô tả thông tin góc quay, đó là: góc quay tương đối và góc quay tuyệt đối. Mỗi phương pháp sẽ có tín hiệu điện đầu ra ở Encoder là khác nhau.
Góc quay tương đối: Góc quay đã chuyển dịch chuyển bao nhiêu độ trước và sau khi chuyển động.
Góc quay tuyệt đối: Vị trí hiện tại đang cách điểm gốc bao nhiêu độ.
.gif)
Hình 1. Quá trình chuyển đổi chuyển động quay thành thông tin về chuyển động quay
- Phương pháp Encoder tương đối mô tả góc quay tương đối
Loại Encoder phát hiện lượng chuyển động từ vị trí này sang vị trí tiếp theo được gọi là loại Encoder phát hiện góc quay tương đối. Nếu chúng ta lấy ví dụ về bản đồ, phương pháp phát hiện góc quay tương đối sẽ cho biết: “Đi tiếp 100 mét trên con đường này và rẽ phải đi thêm 30 mét sẽ có một cửa hàng tiện lợi”. Encoder phát hiện góc quay tương đối sẽ xuất tín hiệu xung số (xung digital) tương ứng với chuyển động quay. Phương pháp này được gọi là phương pháp Encoder tương đối.
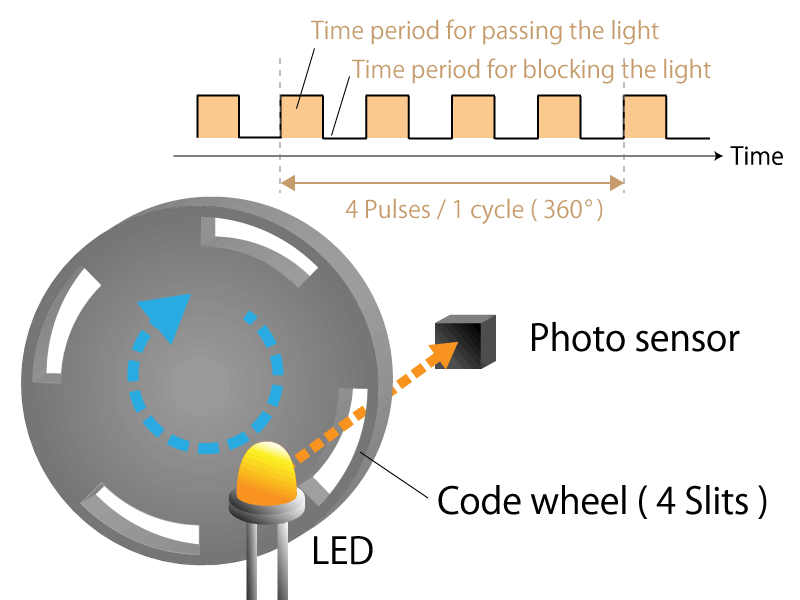
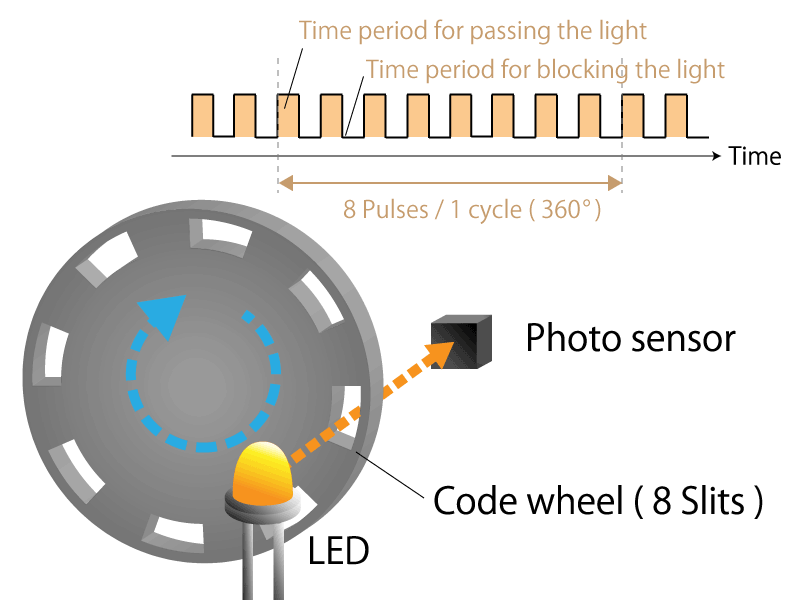
Chúng tôi sẽ lấy ví dụ cho Encoder loại quang đã đề cập đến ở bài trước. Encoder loại quang tạo ra các xung bằng cách quay một đĩa có các khe (lỗ) được đục đối xứng qua tâm. Bằng cách đếm số lượng xung, có thể xác định số đo góc quay (lượng chuyển động) của đĩa. Nếu có 4 khe liên tiếp thành 1 hàng trên đĩa, thì sẽ có 4 xung trên mỗi vòng quay, như vậy 1 xung sẽ tương ứng với góc quay là 360°/4 = 90°. Nếu chúng ta nhân đôi số khe lên thành 8 khe, thì mỗi xung tương ứng góc quay là 360°/8 = 45°. Nếu số lượng khe, tức là số lượng xung trên mỗi vòng quay lớn, thì độ phân giải của số đo góc sẽ cao và có thể mô tả lượng chuyển động được một cách chi tiết.
|
|
|
|
Hình 2a. Encoder vòng quay tương đối 4 khe |
Hình 2b. Encoder vòng quay tương đối 8 khe |
Tuy nhiên, phương pháp này không nhận biết được việc hướng quay thay đổi. Vì vậy, cần tạo ra hai xung lệch pha trong một phần tư chu kỳ. Hai xung này thường được gọi là pha A và pha B. Hướng quay có thể được xác định nhờ xét xem ở pha A hay pha B thì pha nào có xung lên trước. Bằng cách trừ đi số lượng xung trong quá trình quay ngược chiều, có thể xác định chính xác lượng quay được ngay cả khi hướng quay thay đổi.
|
|
|
|
|
Hình 3a. Xung dạng sóng ở pha A và B khi quay theo chiều kim đồng hồ |
Hình 3b. Xung dạng sóng ở pha A và B khi quay ngược chiều kim đồng hồ |
|
- Phương pháp Encoder tuyệt đối mô tả góc quay tuyệt đối
Encoder phát hiện “khoảng cách từ vị trí hiện tại đến điểm gốc” được gọi là loại Encoder phát hiện góc quay tuyệt đối. Nếu chúng ta lấy ví dụ về bản đồ, phương pháp phát hiện góc quay tuyệt đối sẽ cho bạn biết: “Có một cửa hàng tiện lợi ở số ○, ○○-cho, Chiyoda-ku, Tokyo”. Encoder phát hiện góc quay tuyệt đối xuất ra góc quay tuyệt đối của vị trí hiện tại dưới dạng tín hiệu số serial code hoặc dạng điện áp tương tự analog theo lệnh từ vi điều khiển. Phương pháp này được gọi là phương pháp Encoder tuyệt đối.
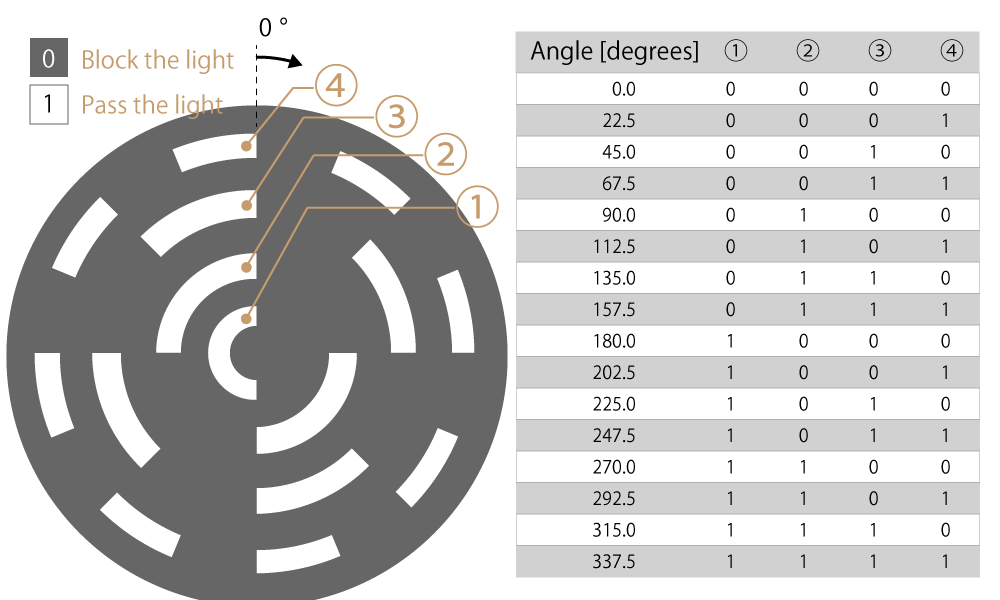
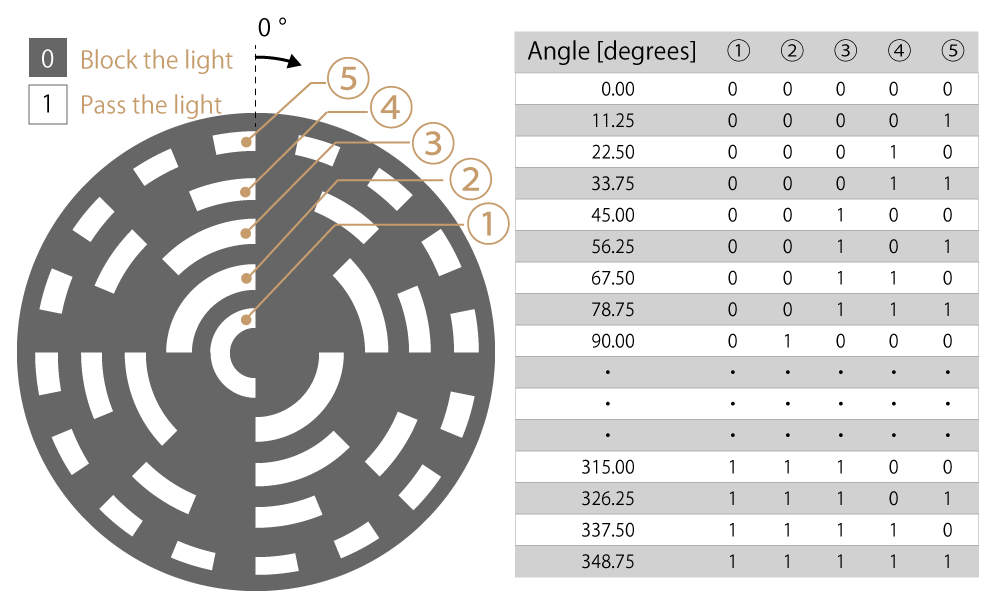
Chúng tôi sẽ tiếp tục sử dụng ví dụ cho Encoder loại quang để giải thích. Phương pháp Encoder tương đối thì chỉ có 1 hàng các khe, nhưng ở phương pháp Encoder tuyệt đối sử dụng nhiều hàng khe. Ví dụ: nếu có 4 hàng khe, sẽ có vị trí tuyệt đối của 16 góc khác nhau được mã hóa nhị phân từ 0000 đến 1111. Nếu sắp xếp các khe thành 5 hàng thì có 32 góc từ 00000 đến 11111. Nếu số hàng khe lên đến 8 hàng, chúng ta có thể xác định tới 256 góc tuyệt đối từ 00000000 đến 11111111. Càng tăng số hàng khe thì độ phân giải của số đo góc quay sẽ càng cao và mô tả được lượng chuyển động càng chi tiết.
|
|
|
|
Hình 4a. Encoder vòng quay tuyệt đối 4 hàng khe |
Hình 4b. Encoder vòng quay tuyệt đối 5 hàng khe |
- Phương pháp Encoder tuyệt đối giả mô tả góc quay tuyệt đối bằng tín hiệu xung
Chúng ta cũng có thể áp dụng phương pháp Encoder tương đối để mô tả góc quay tuyệt đối. Ngoài hàng khe dùng để trích xuất các xung pha A và pha B theo phương pháp Encoder tương đối, ta thêm vào chỉ 1 khe nữa, và tạo ra xung 1 lần duy nhất trong mỗi vòng quay. Xung này được gọi là xung pha Z (Z có nghĩa là Zero = 0). Phương pháp xác định góc quay tuyệt đối nhờ sử dụng xung pha Z làm điểm gốc và phát hiện lượng quay được từ điểm gốc bằng xung pha A với pha B, được gọi là phương pháp Encoder tuyệt đối giả.
|
|
|
|
Hình 5a. Xung dạng sóng pha A, pha B và pha Z khi quay theo chiều kim đồng hồ |
Hình 5b. Xung dạng sóng pha A, pha B và pha Z khi quay ngược chiều kim đồng hồ |
3-2. Ưu điểm và khuyết điểm của góc quay tương đối và góc quay tuyệt đối
Góc quay tương đối và góc quay tuyệt đối có những ưu điểm và khuyết điểm riêng.
Phương pháp Encoder tương đối xác định góc quay tương đối, chỉ có 1 hàng khe (phương pháp Encoder tuyệt đối giả thì có 2 hàng khe), do đó có thể sản xuất đĩa quay Code Wheel với chi phí thấp. Còn với phương pháp Encoder tuyệt đối xác định góc quay tuyệt đối, chi phí sản xuất đĩa quay Code Wheel cao vì độ phân giải số đo góc quay cao do có nhiều hàng khe.
Mặt khác, nếu dừng động cơ, tắt nguồn và sau đó khởi động lại, thì phương pháp Encoder tuyệt đối có thể phát hiện được vị trí ở thời điểm khởi động lại, nhưng phương pháp Encoder tương đối và phương pháp Encoder tuyệt đối giả thì không thể xác định được vị trí ở thời điểm khởi động lại do dữ liệu góc quay lũy kế đã bị xóa.
Hơn nữa, phương pháp Encoder tuyệt đối còn có những ưu điểm và khuyết điểm tùy thuộc vào phương thức truyền tín hiệu.
Trong phương pháp Encoder tuyệt đối, có 2 cách xuất dữ liệu, một là xuất mã nhị phân dưới dạng tín hiệu số digital, hai là chuyển đổi mã nhị phân thành điện áp tương tự analog và xuất ra. Ngoài ra, đối với tín hiệu số, có 2 kiểu xuất dữ liệu, một là xuất tín hiệu song song xuất mã nhị phân thu được từ nhiều khe dưới dạng nhiều đường tín hiệu, kiểu còn lại xuất nối tiếp, tức là nhiều đường tín hiệu khi xuất song song được chuyển thành từng đường tín hiệu tuần tự theo thời gian và được xuất ra.
Hình 6. Mối quan hệ giữa thông tin góc quay, mã nhị phân của tín hiệu đầu ra số digital và điện áp đầu ra tương tự analog
Hình 7. Tín hiệu đầu ra song song và tín hiệu đầu ra được chuyển đổi sang dạng nối tiếp
Tín hiệu số có ưu điểm là chống nhiễu tốt trong quá trình truyền, nhưng có khuyết điểm là xuất tín hiệu song song thì có nhiều đường tín hiệu, xuất tín hiệu nối tiếp thì vì tốn thời gian truyền tải nên khi động cơ quay sẽ có thể xuất hiện sai lệch giữa mã đầu ra và vị trí hiện tại. Tín hiệu tương tự có ưu điểm là chỉ cần một đường truyền tín hiệu và không có độ trễ thời gian, nhưng lại có khuyết điểm là dễ bị tác động bởi nhiễu trong quá trình truyền.
Như vậy, góc quay tương đối và góc quay tuyệt đối có những ưu điểm và khuyết điểm riêng khác nhau, nên các bạn cần chọn loại Encoder phù hợp theo mục đích sử dụng. Ví dụ: việc xác định góc quay của trục động cơ hoặc cánh tay rô bốt sẽ yêu cầu góc quay tuyệt đối, còn việc phát hiện cực từ rôto của động cơ sẽ cần đến góc quay tương đối. Các bạn cần sử dụng phương pháp sao cho đúng với “mục đích”, chẳng hạn như bạn muốn xác định vị trí như thế nào, góc nào là quan trọng.
Tổng kết
• Có hai phương pháp để Encoder mô tả thông tin về chuyển động quay và góc quay là: góc quay tương đối và góc quay tuyệt đối.
• Phương pháp Encoder tương đối mô tả góc quay tương đối, phương pháp Encoder tuyệt đối và phương pháp Encoder tuyệt đối giả mô tả góc quay tuyệt đối.
• Góc quay tương đối và góc quay tuyệt đối có những ưu điểm và khuyết điểm riêng khác nhau, vì vậy cần lựa chọn sử dụng theo đúng “mục đích”.
Lần này, chúng tôi đã giới thiệu đến các bạn phương pháp Encoder tương đối và phương pháp Encoder tuyệt đối. Mong rằng qua đây các bạn có thể nắm được các nội dung về thông tin chuyển động quay và góc quay được thể hiện dưới dạng các góc quay tương đối và góc quay tuyệt đối.
Trong bài viết tới, chúng tôi sẽ trình bày về nguyên lý hoạt động và các đặc điểm của Encoder loại quang.
Hẹn gặp lại!
Tác giả: Đinh Văn Hòa
Nguồn: https://www.akm.com






0 Bình luận