 ️
️[Bài viết số 2] CÁCH THỨC HOẠT ĐỘNG VÀ PHÂN LOẠI ENCODER
- 2023-03-19
- TỰ ĐỘNG HÓA
XT Mechanical Blog xin chào các bạn.

Tiếp nối bài viết số 1, đây là bài thứ 2 trong chuỗi bài viết "Kiến thức cơ bản về Encoder".
Chúng tôi sẽ rất vui nếu như những nội dung sau đây giúp ích được cho các bạn. Những nội dung sau dành cho những bạn muốn học về Encoder, muốn hiểu nội dung công việc dù không trực tiếp làm về Encoder (ví dụ đối với các bạn thiết kế cơ khí) nhưng bộ phận khác trong công ty lại làm về Encoder.
Mục lục
2-1. Cơ chế phát hiện chuyển động quay và góc quay
2-2. Những đại lượng vật lý nào biến đổi khi thực hiện chuyển động quay
2-3. Phân loại thông tin về chuyển động quay và góc quay
Phụ lục 1. Encoder nhận biết chuyển vị tuyến tính
2-1. Cơ chế phát hiện chuyển động quay và góc quay
Ở bài 1, chúng tôi đã trình bày về Encoder là một cảm biến đo tốc độ và góc quay hay quãng đường chuyển động thẳng. Ở đó, cảm biến là một bộ phận hoặc linh kiện điện tử dùng để phát hiện những thay đổi trong thế giới tự nhiên. Chẳng hạn, cảm biến quang phát hiện trạng thái bật/tắt (On/Off) của ánh sáng, hay như cảm biến từ phát hiện sự phân bố của từ trường.
Tuy nhiên, đây không phải là chức năng duy nhất của cảm biến. Nhờ có cảm biến xuất ra những tín hiệu điện tương ứng với sự thay đổi của đại lượng vật lý được phát hiện, mà chúng ta có thể truyền thông tin đến bộ phận bên ngoài. Như mô tả trong Hình 1, Encoder sẽ xử lý tín hiệu điện được xuất ra từ phần tử cảm biến, và cuối cùng xuất thông tin về chuyển động quay/góc quay tới bộ phận bên ngoài dưới dạng tín hiệu số (digital) hoặc tín hiệu tương tự (analog).
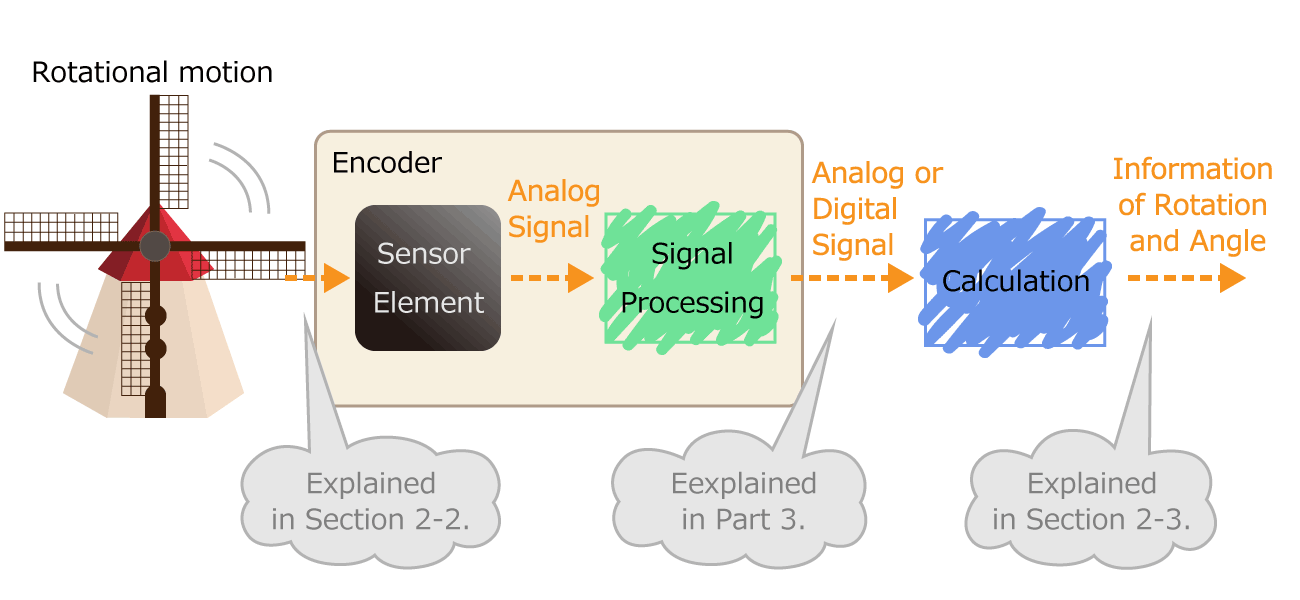
Hình 1. Quá trình chuyển đổi chuyển động quay thành dạng thông tin về chuyển động quay
2-2. Những đại lượng vật lý nào biến đổi khi thực hiện chuyển động quay
Sự khác nhau về các đại lượng vật lý được phát hiện có liên quan trực tiếp đến sự khác nhau trong cách thức phát hiện của cảm biến, nên nó là một thành phần quan trọng quyết định các đặc tính (ưu điểm / nhược điểm) của Encoder.
Dựa trên cách thức phát hiện, chúng ta có thể phân loại Encoder thành bốn loại sau.
Loại cơ khí (loại tiếp xúc cơ)
Cách thức phát hiện ở đây là xác định vị trí quay bằng cách sử dụng một biến trở có điện trở thay đổi tỷ lệ thuận với góc quay. Encoder loại cơ khí như này thường được gọi là “chiết áp” (Potentiometer).
Chiết áp thay đổi giá trị điện trở của nó sao cho tỷ lệ thuận với khoảng cách di chuyển của tiếp điểm di động khi tiếp điểm di chuyển trên thân điện trở.

Hình 2. Sơ đồ mô hình Encoder loại cơ khí (tiếp xúc cơ)
Loại quang
Cách thức hoạt động là dùng một cảm biến quang phát hiện xem ánh sáng có đi qua các khe hay không, trong đó, các khe (lỗ) được đục đối xứng qua tâm trên một đĩa quay (“bánh xe mã hóa”- Code wheel) gắn với trục động cơ.
Tín hiệu xung ánh sáng biến đổi khi có ánh sáng chiếu qua khe, và ta có thể xác định số đo góc quay của trục động cơ bằng cách đếm số lượng xung. Chúng tôi sẽ giải thích nguyên lý hoạt động và các đặc điểm của Encoder loại quang trong bài viết số 4.
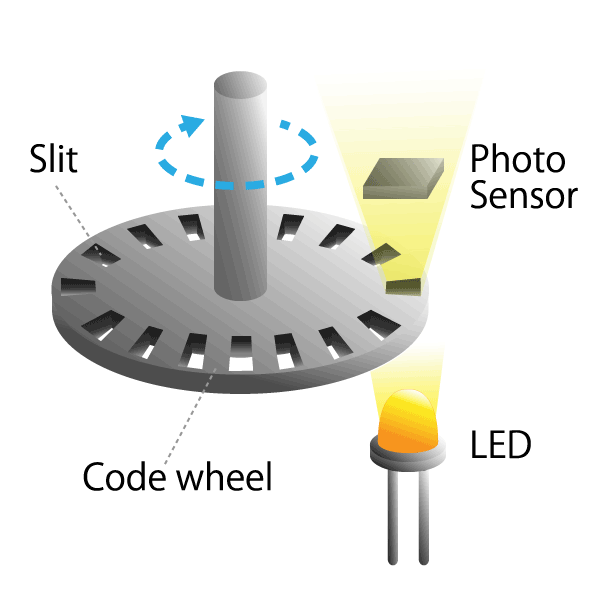
Hình 3. Sơ đồ mô hình Encoder loại quang.
Loại từ tính
Encoder loại từ tính sử dụng cảm biến từ để đọc những thay đổi của phân bố từ trường được tạo ra bởi nam châm vĩnh cửu gắn trên trục động cơ. Khi động cơ quay, sự phân bố từ trường của nam châm vĩnh cửu cũng sẽ thay đổi, và bằng cách dùng cảm biến từ phát hiện điều đó mà chúng ta có thể xác định vị trí quay của trục động cơ. Chúng tôi sẽ giải thích nguyên lý hoạt động và các đặc điểm của Encoder loại từ tính trong bài viết số 5.
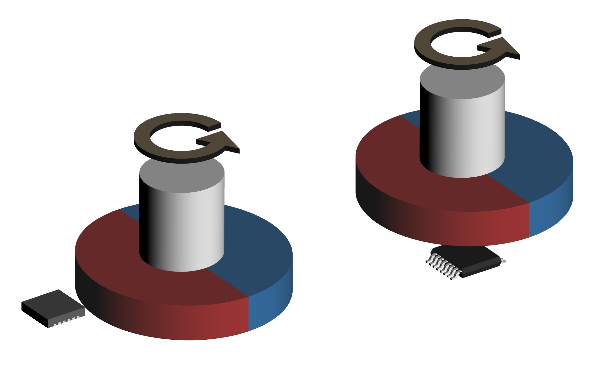
Hình 4. Sơ đồ mô hình Encoder loại từ tính
Loại cảm ứng điện từ
Cách thức hoạt động của loại này là đọc những thay đổi của từ trường được sinh ra giữa cuộn dây cảm ứng (cuộn dây kích từ) và cuộn dây cố định (cuộn dây đọc thay đổi) được gắn trên trục động cơ.
Encoder loại này có nguyên lý cơ bản giống với máy biến áp sử dụng nguyên lý cảm ứng điện từ, và thường được gọi là “bộ phân giải” (Resolver). Cách cấp điện cho cuộn dây cảm ứng quay của bộ phân giải là phương pháp tiếp xúc sử dụng chổi than, do đó có nguy cơ bị mài mòn. Để cải tiến cho vấn đề này, chúng ta có bộ phân giải loại VR (Biến kháng – Variable Reactance).
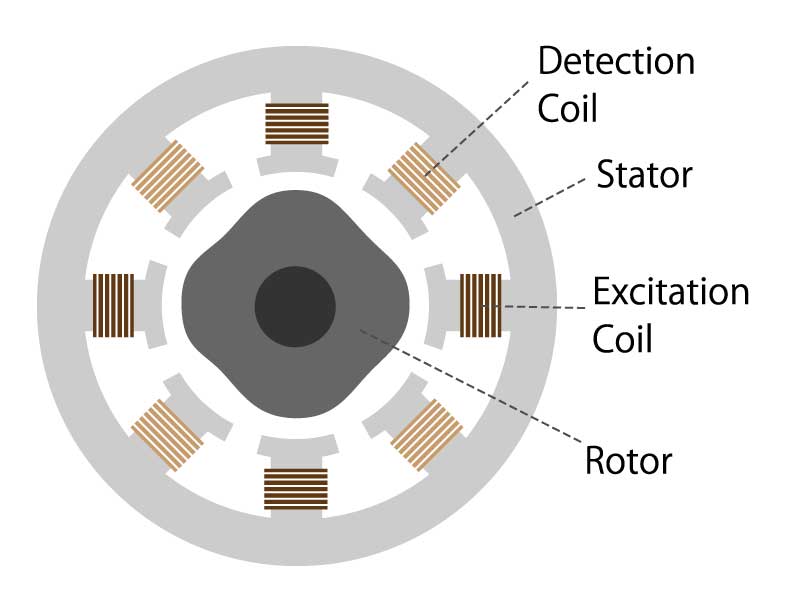
Hình 5. Sơ đồ mô hình Encoder loại cảm ứng điện từ
2-3. Phân loại thông tin về chuyển động quay và góc quay
Một vật đang quay sẽ có những trạng thái như thế nào? Chúng ta hãy cùng xem ví dụ về động cơ nhé. Nó gồm có các trạng thái như dừng, quay theo chiều kim đồng hồ, quay ngược chiều kim đồng hồ, quay với tốc độ không đổi, tăng tốc, giảm tốc, v.v. Những thông tin cần thiết để nắm bắt chính xác các trạng thái này và để quay động cơ một cách chính xác, gồm có bốn loại sau.
Số đo góc quay
Đây là thông tin về giá trị của góc quay đã quay được của trục động cơ.
Ví dụ, trong động cơ một chiều (DC) không chổi than, số đo góc quay của rôto có thể được xác định bằng cách phát hiện sự thay đổi cực từ của rôto và nhờ đó động cơ có thể quay với độ chính xác cao.
Hình 6. Giải thích về số đo góc quay
Tốc độ quay
Đây là thông tin về tốc độ đã quay được của động cơ.
Như chúng tôi đã đề cập trong bài viết số 1, chúng ta dùng động cơ servo phát hiện tốc độ quay của động cơ một chiều không chổi than hoặc động cơ xoay chiều, và thực hiện điều khiển phản hồi để đạt được tốc độ quay đặt được thiết lập nhờ bộ khuếch đại servo.
Hướng quay
Đây là thông tin về việc trục động cơ đã quay theo chiều kim đồng hồ (CW: Clockwise) hay ngược chiều kim đồng hồ (CCW: Counter Clockwise).
Trong trường hợp hệ thống phát hiện góc quay của động cơ dưới dạng số xung đầu ra từ Encoder, nếu không xác định đúng hướng quay thì góc quay được tính sẽ không chính xác.
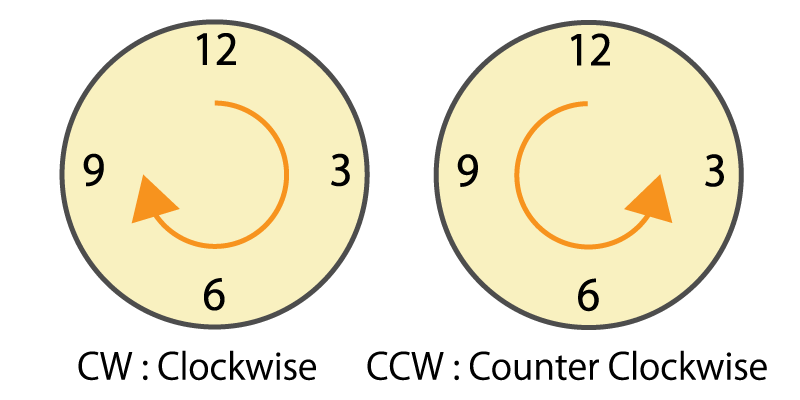
Hình 7. Hướng quay theo chiều kim đồng hồ và ngược chiều kim đồng hồ
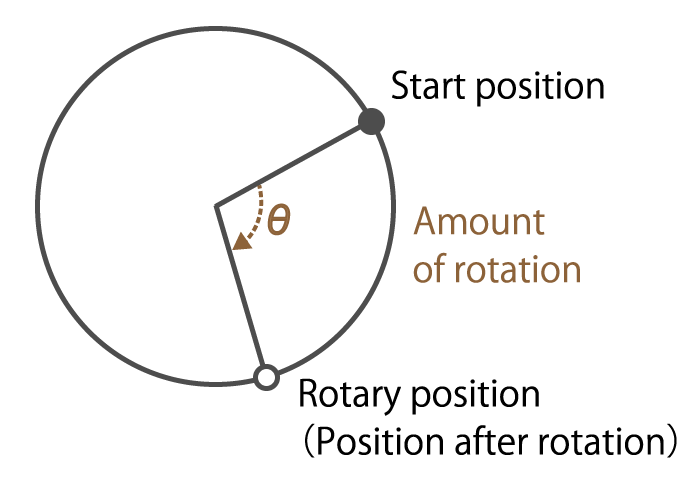
Vị trí quay
Đây là thông tin về việc góc quay của trục động cơ đang ở vị trí góc nào.
Như đã nói trong bài 1, động cơ servo và động cơ servo bước sử dụng Encoder để xác định góc quay, vừa đánh giá xem đã di chuyển đến góc quay mục tiêu hay chưa, vừa điều khiển phản hồi để đến được góc quay mục tiêu đó. Nhờ đó, cho phép chúng ta điều khiển định vị trí với độ chính xác cao.
Tổng kết
Encoder sử dụng phần tử cảm biến để phát hiện lượng thay đổi của các đại lượng vật lý khi thực hiện chuyển động quay, và sau cùng truyền thông tin về chuyển động quay/góc quay dưới dạng tín hiệu điện đến bộ phận bên ngoài.
Chúng ta có thể phân loại Encoder theo cách thức hoạt động thành 4 loại là: loại cơ khí, loại quang, loại từ tính và loại cảm ứng điện từ.
Có 4 loại thông tin cần thiết để động cơ quay với độ chính xác cao, đó là: số đo góc quay, tốc độ quay, hướng quay và vị trí quay.
Đến đây, chúng tôi đã giới thiệu đến các bạn các loại Encoder cũng như cách thức hoạt động của chúng. Chúng tôi mong rằng qua đó các bạn sẽ nhớ được có 4 loại thông tin về chuyển động quay cần xác định để điều khiển động cơ quay với độ chính xác cao, và có 4 loại Encoder với nguyên lý hoạt động khác nhau tùy thuộc vào đại lượng vật lý được phát hiện.
Trong bài viết tiếp theo, chúng tôi sẽ nói về Encoder tương đối và Encoder tuyệt đối.
Phụ lục 1. Encoder nhận biết chuyển vị tuyến tính
Encoder nhận biết chuyển vị tuyến tính thường được sử dụng trong những máy gia công yêu cầu độ chính xác vị trí cao, chẳng hạn như máy phay hay máy khoan bàn. Có hai phương pháp để phát hiện chuyển vị tuyến tính như sau.
Phương pháp phát hiện chuyển vị tuyến tính bằng Encoder tuyến tính, là dạng Encoder chuyển động thẳng (tịnh tiến)
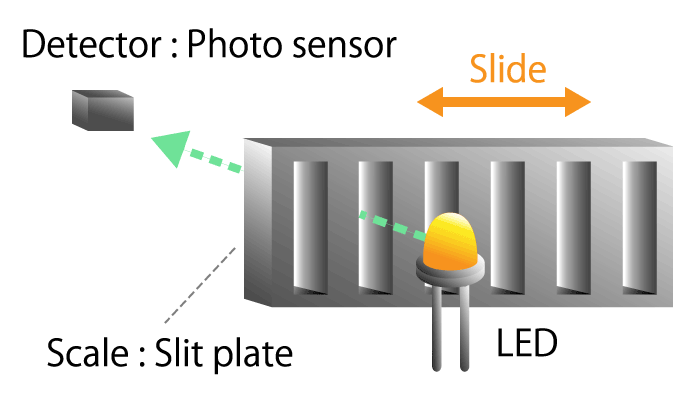
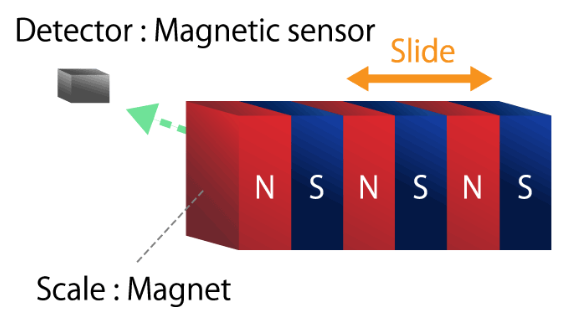
Encoder tuyến tính có cấu tạo bao gồm một thước đo (có chia vạch) và một đầu dò (detector) xác định thông tin về vị trí. Nó còn được gọi là Encoder thước đo tuyến tính. Giống với Encoder vòng quay, có 2 cách thức phát hiện ở Encoder tuyến tính là: phương pháp quang sử dụng nguyên lý phản xạ ánh sáng và phương pháp từ tính sử dụng đặc tính từ.
|
|
|
|
Hình 8a. Encoder tuyến tính loại quang |
Hình 8b. Encoder tuyến tính loại từ tính |
Phương pháp biến đổi chuyển động quay thành chuyển động thẳng và phát hiện chuyển vị quay bằng Encoder vòng quay
Cơ cấu biến chuyển động quay của trục vít thành chuyển động tịnh tiến của đai ốc được gọi là “cơ cấu vít dẫn hướng”. Một ví dụ điển hình có thể kể tới là trục vít me, trong đó các viên bi được chèn vào giữa trục vít và đai ốc; khi trục vít quay, chuyển động lăn của các viên bi làm cho đai ốc chuyển động theo một đường thẳng. Chúng ta có thể xác định chuyển vị tuyến tính của trục vít me bằng cách sử dụng thông tin về vị trí quay và số vòng quay của trục vít.
Vì trục vít me có thể cho ra độ chính xác vị trí cao, nên thường được sử dụng trong máy gia công, dụng cụ đo lường, máy photocopy hay máy in.
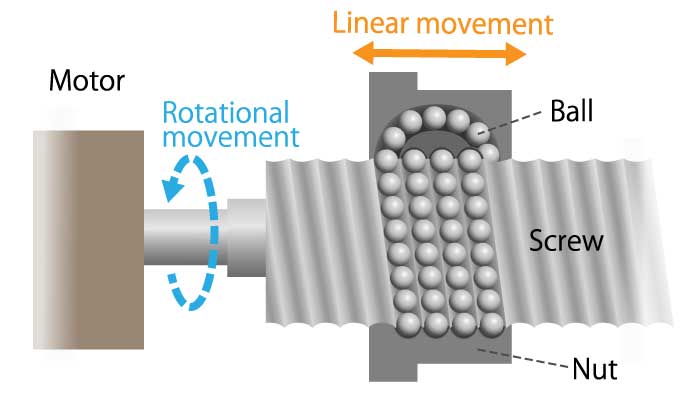
Hình 9. Cơ cấu vít me
Hẹn gặp lại!
Tác giả: Đinh Văn Hòa
Nguồn: https://www.akm.com/jp/ja/products/rotation-angle-sensor/tutorial/type-mechanism-1/






0 Bình luận