Mục lục
Những mục cần chú ý
- Mục xin từ chối trách nhiệm Xin đọc mục này trước khi sử dụng công cụ
- Internet Explorer có thể không sử dụng được. Xin hãy sử dụng các trình duyệt như Google chrome hay Microsoft Edge.
- Trong trường hợp công cụ không hoạt động chính xác, hãy thử xóa bỏ phần lịch sử duyệt web và tải lại. (Tóm lại, xin hãy xóa bộ nhớ cache)
- Nếu bạn vẫn gặp sự cố sau khi thử các cách trên, chúng tôi rất xin lỗi đã làm bạn mất thời gian. Xin hãy liên hệ chúng tôi tại địa chỉ email [email protected]. Xin hãy liên hệ qua địa chỉ email: [email protected]
Lựa chọn phương thức vận chuyển

Nhập bằng tay
Nhập bằng tay những điều kiện vận hành
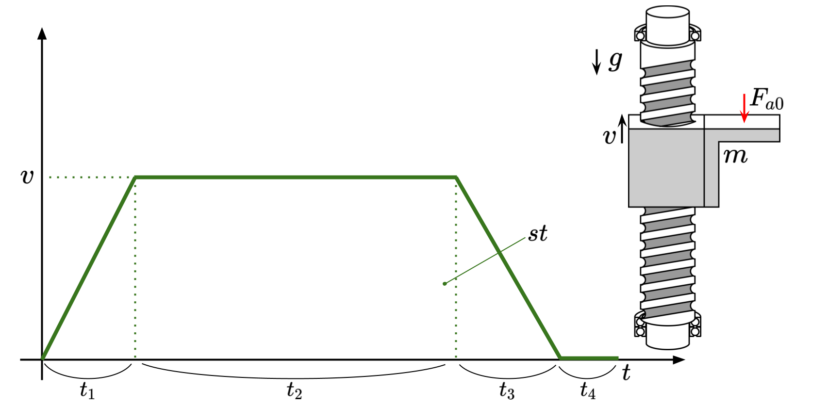
| Khoảng di chuyển | $$st$$ | ||
| Lượng tịnh tiến nhỏ nhất | $$S$$ | ||
|
|
|
|
| Tốc độ lớn nhất | $$v$$ | ||
|
|
|
|
| Khối lượng của sản phẩm | $$m$$ | ||
| Gia tốc tăng tốc trọng trường | $$g$$ | ||
| Ngoại lực tác động theo hướng dọc trục | $$F_{a}$$ |
-
Khi nhập bằng tay 「Khoảng di chuyển」「Thời gian tăng tốc」「Thời gian giảm tốc」 thì đại lượng này sẽ được tính toán tự động. Công thức tính toán được thể hiện dưới đây
$$t_2=\frac{(st)}{v}-\frac{1}{2}(t_1+t_3)$$
- Khi nhập bằng tay các mục quan trọng vào sẽ cho ra kết quả tính toán tự động.
Nhập bằng tay đặc tính của vít me
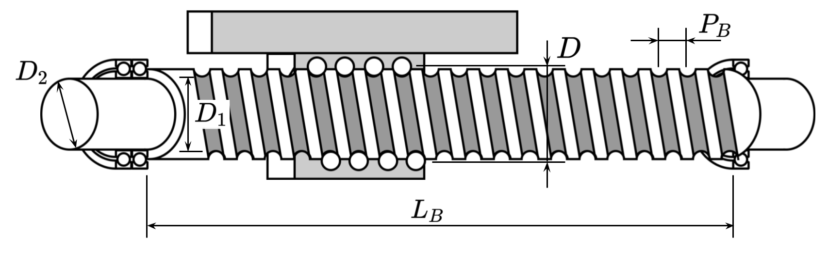
| Đường kính vòng bi | $$D$$ | ||
| Đường kính gốc trục vít me | $$D_1$$ | ||
| Đường kính đầu trục vít me | $$D_2$$ | ||
| Bước ren của vít me | $$P_B$$ | ||
| Khoảng cách lắp đặt gối đỡ vít me | $$L_B$$ | ||
| Mô men quán tính chính tâm của trục vít me ※1 | $$I=\frac{\pi D_1^4}{64}$$ | ||
| Mô men quán tính khối lượng của vít me | $$J_B$$ | ||
| Môdul Young | $$E$$ | ||
| Khối lượng riêng | $$\rho$$ | ||
| Hệ số ma sát bề mặt※2 | $$\mu$$ | ||
| Lực kháng bề mặt tiếp xúc(Lúc không tải) | $$f$$ | ||
| Hệ số trạng thái đầu-cuối trụ vít liên quan đến cong vênh dọc trục | $$\lambda_1$$ | ||
| Hệ số trạng thái đầu-cuối trục vít liên quan đến tốc độ quay cho phép | $$\lambda_2$$ | ||
| Ứng suất nén kéo cho phép của trục vít※3 | $$\sigma'$$ | ||
| Ứng suất uốn cho phép của trục vít※4 | $$\sigma_M'$$ | ||
| Ứng suất xoắn cho phép của trục vít※5 | $$\tau_T'$$ | ||
| Giá trị DN | $$DN$$ | ||
| Tải trọng tĩnh định mức cơ bản | $$C_0$$ | ||
| Tải trọng động định mức cơ bản | $$C$$ | ||
| Hệ số an toàn tĩnh※6 | $$f_s$$ | ||
| Hệ số tải trọng※7 | $$f_w$$ | ||
| Hiệu suất của vít me※8 | $$\eta$$ | ||
| tải trọng sẵn có preload※9,※10 | $$F_p$$ |
- Khi nhập bằng tay các mục quan trọng vào sẽ cho ra kết quả tính toán tự động.
- Trong trường hợp bình thường, hệ số ma sát lăn là khoảng 0,003 và hệ số ma sát trượt là khoảng 0,2.
- Nếu là sản phẩm của THK, giá trị là 147 MPa (Catalog THK)
- Nếu là sản phẩm của THK, giá trị là 98 MPa (Catalog THK)
- Nếu là sản phẩm của THK, giá trị là 49 MPa (Catalog THK)
-
Tài liệu tham khảo:Catalog THK bảng 18
- Máy móc công nghiệp nói chung, khi không có tác động kiểu rung động:
- 1.0~3.5
- Máy móc công nghiệp nói chung, khi có tác động kiểu rung động:
- 2.0~5.0
- Máy công cụ, khi không có tác động kiểu rung động:
- 1.0~4.0
- Máy công cụ, khi có tác động kiểu rung động:
- 2.5~7.0
-
Tài liệu tham khảo:Catalog THK bảng 19
- Tác động rung (siêu nhỏ)、vận tốc v≦0.25m/s:
- 1.0~1.2
- Tác động rung (nhỏ)、vận tốc 0.25<v≦1m/s:
- 1.2~1.5
- Tác động rung (vừa)、vận tốc 1<v≦2m/s:
- 1.5~2.0
- Tác động rung (lớn)、vận tốc v>2m/s:
- 2.0~3.5
- Nếu là sản phẩm của THK、giá trị là 0.9~0.95(Catalog THK)
- Ước tính giá trị lớn nhất tải trọng sẵn có preload là khoảng 10% tải trọng động định mức cơ bảnĐể biết chính xác gía trị tải trọng sẵn có preload 、Xin hãy liên hệ với nhà sản xuất vít me。(Catalog THKtheo đó )
- Tỷ lệ biến đổi mô men xoắn tải trọng có sẵn preload xin hãy tham khảo catalog của nhà sản xuất vít me
Nhập bằng tay mô men quán tính mô tơ
| Mô men xoắn định mức mô tơ | $$T_{M}'$$ | ||
| Mô men xoắn lớn nhất tức thời của mô tơ | $$T_{Mmax}'$$ | ||
| Mô men phanh hãm của mô tơ | $$T_{MB}'$$ | ||
| Mô men quán tính mô tơ | $$J_M$$ | ||
| Tỷ số truyền | $$i$$ |
Nhập bằng tay các đặc trưng khác
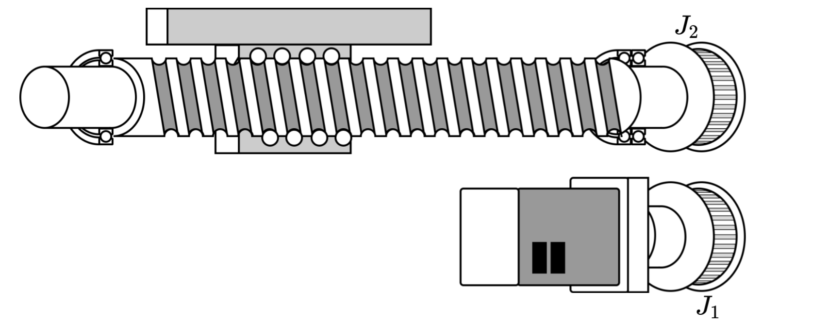
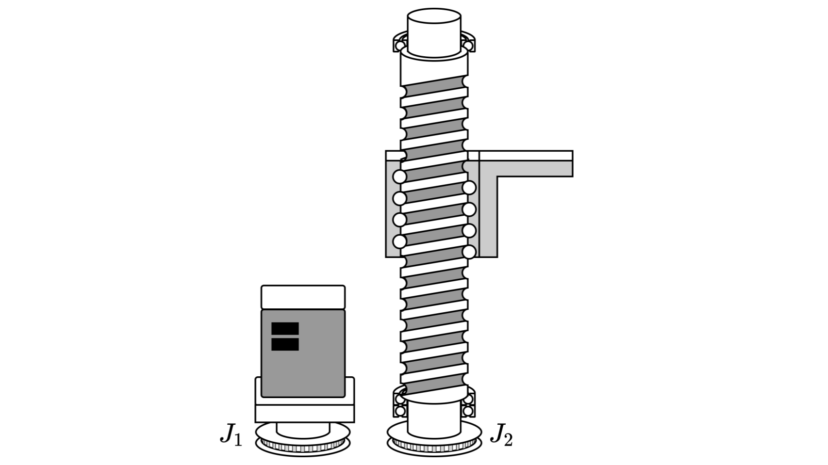
| Mômen quán tính các phần tử máy gắn trên trục động cơ※1 | $$J_1$$ | ||
| Mômen quán tính các phần tử máy gắn trên trục tải trọng※2 | $$J_2$$ | ||
| Mômen xoắn do ma sát của các đệm dầu...※2 | $$T_f$$ | ||
| Mômen uốn tác dụng trên đầu trục vít※3 | $$M$$ |
- Giá trị trên trục của mô tơ
- Giá trị phụ tải trên trục
- Nếu bạn muốn tính toán những đại lượng đó, xin vui lòng sử dụng công cụ tính toán này Công cụ tính toán biến dạng/ứng suất uốn của dầm
Kết quả
Kết quả(Tải trọng hướng trục cho phép)
|
|
|
|
| Tải trọng hướng trục lớn nhất | $$F_{max}=\max(|F_1|,|F_2|,|F_3|)$$ | ||
| Tải trọng cong vênh của trục vít | $$F_B'=\lambda_1\frac{\pi^2EI}{L^2_B}$$ | ||
| Tải trọng kéo nén cho phép của trục vít | $$F_T'=\frac{\sigma\pi D^2_1}{4}$$ | ||
|
|
|
|
| Tải trọng hướng trục cho phép trục vít gia công bằng phương pháp cán | $$F_R=\frac{C_0}{f_s}$$ |
Kết quả(Tốc độ quay cho phép)
| Tốc độ quay của vít me※1 | $$N_B=\frac{60v}{P_B}$$ | ||
| Tốc độ quay cho phép phụ thuộc vào vận tốc nguy hiểm※1 | $$N_1'=\frac{60\lambda_2^2}{2\pi L_B^2}\sqrt{\frac{EI\cdot10^3}{\rho\pi D_1^2/4}}$$ | ||
| Tốc độ quay cho phép phụ thuộc vào giá trị DN ※1 | $$N_2'=\frac{(DN)}{D}$$ | ||
| Tốc độ quay cho phép※1 | $$N'=\min(N_1', N_2')$$ | ||
| Hệ số an toàn(số vòng quay)※1 | $$SF_N=\frac{N'}{N_B}$$ |
- Các giá trị trên trục vít me
Kết quả(Tính toán tuổi thọ)
| Tuổi thọ định mức(Tổng số vòng quay) | $$L=\left(\frac{C}{f_w F_{max}}\right)^3\cdot10^6$$ | ||
| Tuổi thọ thời gian | $$L_h=\frac{LP_B}{2\cdot60^2(st)/t}$$ | ||
| Tuổi thọ theo quãng đường di chuyển | $$L_s=LP_B$$ |
Kết quả(Lựa chọn mô tơ)
| tốc độ vòng quay yêu cầu của mô tơ※1 | $$N_M=\frac{60v}{P_B}i$$ | ||
| Mô men quán tính của tải※1 | $$J=J_1+\left(J_2+J_B+m\left(\frac{P_B}{2\pi}\right)^2\right)\cdot\frac{1}{i^2}$$ | ||
| Mô men xoắn preload※2 | $$T_p=0.05\left(\frac{P_B}{\pi D}\right)^{-0.5}\cdot\frac{F_pP_B}{2\pi}$$ | ||
| Mô men xoắn tải trọng bên ngoài※2 | $$T_a=\frac{F_{max}P_B}{2\pi\eta}$$ | ||
| Mô men xoắn yêu cầu khi tốc độ ổn định※1 | $$T_2=\frac{T_p+T_a+T_f}{i}$$ | ||
|
|
|
|
| Mô men xoắn định mức yêu cầu※1 | $$T_{Rated}=\sqrt{\frac{T_1^2t_1+T_2^2t_2+T_3^2t_3}{t}}$$ | ||
| Mô men xoắn yêu cầu của phanh hãm※1 | $$T_{MB}=\frac{(F_a-\mu mg-f)P_B}{2\pi \eta i}$$ | ||
|
|
|
|
| Độ phân giải yêu cầu ※1 | $$B=\frac{P_B}{iS}$$ | ||
| tỷ lệ quán tính※1 | $$J_{ratio}=\frac{J}{J_M}$$ |
- giá trị trên trục mô tơ
- giá trị trên trục tải
Kết quả(Đường kính cần thiết đầu trục vít me )
| Mô men uốn tương đương | $$M_e=\frac{M+\sqrt{M^2+T^2}}{2}$$ | ||
| Mô men xoắn tương đương | $$T_{e}=\sqrt{M^2+T^2}$$ | ||
| Đường kính cần thiết đầu trục vít me (Chống uốn) | $$D_M=\sqrt[3]{\frac{32M_e}{\pi \sigma_M}}$$ | ||
| Đường kính cần thiết đầu trục vít me (Chống xoắn) | $$D_T=\sqrt[3]{\frac{16T_e}{\pi \tau_M}}$$ | ||
| Đường kính cần thiết đầu trục vít me | $$D_2'=\max(D_M, D_T)$$ |
Nhập bằng tay
Nhập bằng tay những điều kiện vận hành
| Khoảng di chuyển | $$st$$ | ||
| Lượng tịnh tiến nhỏ nhất | $$S$$ | ||
|
|
|
|
| Tốc độ lớn nhất | $$v$$ | ||
|
|
|
|
| Khối lượng của sản phẩm | $$m$$ | ||
| Gia tốc tăng tốc trọng trường | $$g$$ | ||
| Ngoại lực tác động theo hướng dọc trục | $$F_{a}$$ |
-
Khi nhập bằng tay 「Khoảng di chuyển」「Thời gian tăng tốc」「Thời gian giảm tốc」 thì đại lượng này sẽ được tính toán tự động.。Công thức tính toán được thể hiện dưới đây
$$t_2=\frac{(st)}{v}-\frac{1}{2}(t_1+t_3)$$
- Khi nhập bằng tay các mục quan trọng vào sẽ cho ra kết quả tính toán tự động.
Nhập bằng tay đặc tính của vít me
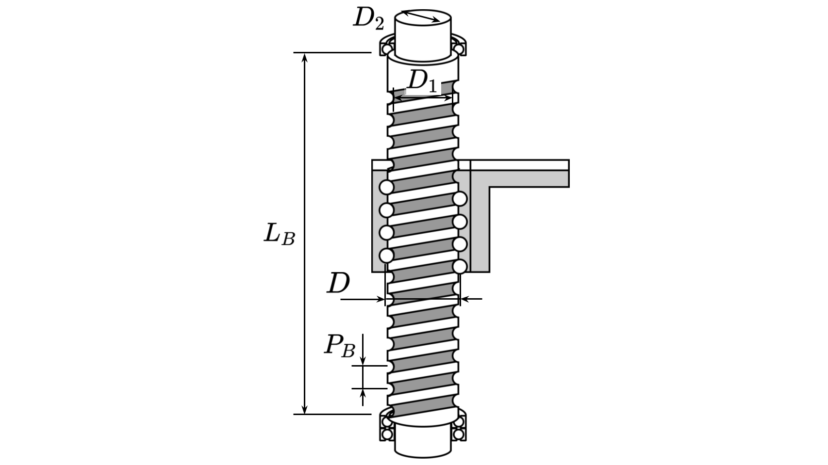
| Đường kính vòng bi | $$D$$ | ||
| Đường kính gốc trục vít me | $$D_1$$ | ||
| Đường kính đầu trục vít me | $$D_2$$ | ||
| Bước ren của vít me | $$P_B$$ | ||
| Khoảng cách lắp đặt gối đỡ vít me | $$L_B$$ | ||
| Mô men quán tính chính tâm của trục vít me ※1 | $$I=\frac{\pi D_1^4}{64}$$ | ||
| Mô men quán tính khối lượng của vít me | $$J_B$$ | ||
| Môdul Young | $$E$$ | ||
| Khối lượng riêng | $$\rho$$ | ||
| Lực kháng bề mặt tiếp xúc(Lúc không tải) | $$f$$ | ||
| Hệ số trạng thái đầu-cuối trục vít liên quan đến cong vênh dọc trục | $$\lambda_1$$ | ||
| Hệ số trạng thái đầu-cuối trục vít liên quan đến tốc độ quay cho phép | $$\lambda_2$$ | ||
| Ứng suất nén kéo cho phép của trục vít※3 | $$\sigma'$$ | ||
| Ứng suất uốn cho phép của trục vít※4 | $$\sigma_M'$$ | ||
| Ứng suất xoắn cho phép của trục vít※5 | $$\tau_T'$$ | ||
| Giá trị DN | $$DN$$ | ||
| Tải trọng tĩnh định mức cơ bản | $$C_0$$ | ||
| Tải trọng động định mức cơ bản | $$C$$ | ||
| Hệ số an toàn tĩnh※6 | $$f_s$$ | ||
| Hệ số tải trọng※7 | $$f_w$$ | ||
| Hiệu suất của vít me※8 | $$\eta$$ | ||
| tải trọng sẵn có preload※9,※10 | $$F_p$$ |
- Khi nhập bằng tay các mục quan trọng vào sẽ cho ra kết quả tính toán tự động.
- Trong trường hợp bình thường, hệ số ma sát lăn là khoảng 0,003 và hệ số ma sát trượt là khoảng 0,2.
- Nếu là sản phẩm của THK, giá trị là 147 MPa (Catalog THK)
- Nếu là sản phẩm của THK, giá trị là 98 MPa (Catalog THK)
- Nếu là sản phẩm của THK, giá trị là 49 MPa (Catalog THK)
-
Tài liệu tham khảo:Catalog THK bảng 18
- Máy móc công nghiệp nói chung, khi không có tác động kiểu rung động:
- 1.0~3.5
- Máy móc công nghiệp nói chung, khi có tác động kiểu rung động:
- 2.0~5.0
- Máy công cụ, khi không có tác động kiểu rung động:
- 1.0~4.0
- Máy công cụ, khi có tác động kiểu rung động:
- 2.5~7.0
-
Tài liệu tham khảo:Catalog THK bảng 19
- Tác động rung (siêu nhỏ)、vận tốc v≦0.25m/s:
- 1.0~1.2
- Tác động rung (nhỏ)、vận tốc 0.25<v≦1m/s:
- 1.2~1.5
- Tác động rung (vừa)、vận tốc 1<v≦2m/s:
- 1.5~2.0
- Tác động rung (lớn)、vận tốc v>2m/s:
- 2.0~3.5
- Nếu là sản phẩm của THK、giá trị là 0.9~0.95(Catalog THK)
- Ước tính giá trị lớn nhất tải trọng sẵn có preload là khoảng 10% tải trọng động định mức cơ bảnĐể biết chính xác gía trị tải trọng sẵn có preload 、Xin hãy liên hệ với nhà sản xuất vít me。(Catalog THKtheo đó )
- Tỷ lệ biến đổi mô men xoắn tải trọng có sẵn preload xin hãy tham khảo catalog của nhà sản xuất vít me
Nhập bằng tay mô men quán tính mô tơ
| Mô men xoắn định mức mô tơ | $$T_{M}'$$ | ||
| Mô men xoắn lớn nhất tức thời của mô tơ | $$T_{Mmax}'$$ | ||
| Mô men phanh hãm của mô tơ | $$T_{MB}'$$ | ||
| Mô men quán tính mô tơ | $$J_M$$ | ||
| Tỷ số truyền | $$i$$ |
Nhập bằng tay các đặc trưng khác
| Mômen quán tính các phần tử máy gắn trên trục động cơ※1 | $$J_1$$ | ||
| Mômen quán tính các phần tử máy gắn trên trục tải trọng※2 | $$J_2$$ | ||
| Mômen xoắn do ma sát của các đệm dầu...※2 | $$T_f$$ | ||
| Mômen uốn tác dụng trên đầu trục vít※3 | $$M$$ |
- Giá trị trên trục của mô tơ
- Giá trị phụ tải trên trục
- Nếu bạn muốn tính toán những đại lượng đó, xin vui lòng sử dụng công cụ tính toán này Công cụ tính toán biến dạng/ứng suất uốn của dầm
Kết quả
Kết quả(Tải trọng hướng trục cho phép)
|
|
|
|
| Tải trọng hướng trục lớn nhất | $$F_{max}=\max(|F_1|,|F_2|,|F_3|)$$ | ||
| Tải trọng cong vênh của trục vít | $$F_B'=\lambda_1\frac{\pi^2EI}{L^2_B}$$ | ||
| Tải trọng kéo nén cho phép của trục vít | $$F_T'=\frac{\sigma'\pi D^2_1}{4}$$ | ||
|
|
|
|
| Tải trọng hướng trục cho phép trục vít gia công bằng phương pháp cán | $$F_R=\frac{C_0}{f_s}$$ |
Kết quả(Tốc độ quay cho phép)
| Tốc độ quay của vít me※1 | $$N_B=\frac{60v}{P_B}$$ | ||
| Tốc độ quay cho phép phụ thuộc vào vận tốc nguy hiểm※1 | $$N_1'=\frac{60\lambda_2^2}{2\pi L_B^2}\sqrt{\frac{EI\cdot10^3}{\rho\pi D_1^2/4}}$$ | ||
| Tốc độ quay cho phép phụ thuộc vào giá trị DN ※1 | $$N_2'=\frac{(DN)}{D}$$ | ||
| Tốc độ quay cho phép※1 | $$N'=\min(N_1', N_2')$$ | ||
| Hệ số an toàn(số vòng quay)※1 | $$SF_N=\frac{N'}{N_B}$$ |
- Các giá trị trên trục vít me
Kết quả(Tính toán tuổi thọ)
| Tuổi thọ định mức(Tổng số vòng quay) | $$L=\left(\frac{C}{f_w F_{max}}\right)^3\cdot10^6$$ | ||
| Tuổi thọ thời gian | $$L_h=\frac{LP_B}{2\cdot60^2(st)/t}$$ | ||
| Tuổi thọ theo quãng đường di chuyển | $$L_s=LP_B$$ |
Kết quả(Lựa chọn mô tơ)
| tốc độ vòng quay yêu cầu của mô tơ※1 | $$N_M=\frac{60v}{P_B}i$$ | ||
| Mô men quán tính của tải※1 | $$J=J_1+\left(J_2+J_B+m\left(\frac{P_B}{2\pi}\right)^2\right)\cdot\frac{1}{i^2}$$ | ||
| Mô men xoắn preload※2 | $$T_p=0.05\left(\frac{P_B}{\pi D}\right)^{-0.5}\cdot\frac{F_pP_B}{2\pi}$$ | ||
| Mô men xoắn tải trọng bên ngoài※2 | $$T_a=\frac{F_{max}P_B}{2\pi\eta}$$ | ||
| Mô men xoắn yêu cầu khi tốc độ ổn định※1 | $$T_2=\frac{T_p+T_a+T_f}{i}$$ | ||
|
|
|
|
| Mô men xoắn định mức yêu cầu※1 | $$T_{Rated}=\sqrt{\frac{T_1^2t_1+T_2^2t_2+T_3^2t_3}{t}}$$ | ||
| Mô men xoắn yêu cầu của phanh hãm※1 | $$T_{MB}=\frac{(F_a+mg-f)P_B}{2\pi \eta i}$$ | ||
|
|
|
|
| Độ phân giải yêu cầu ※1 | $$B=\frac{P_B}{iS}$$ | ||
| tỷ lệ quán tính※1 | $$J_{ratio}=\frac{J}{J_M}$$ |
- giá trị trên trục mô tơ
- giá trị trên trục tải
Kết quả(Đường kính cần thiết đầu trục vít me )
| Mô men uốn tương đương | $$M_e=\frac{M+\sqrt{M^2+T^2}}{2}$$ | ||
| Mô men xoắn tương đương | $$T_{e}=\sqrt{M^2+T^2}$$ | ||
| Đường kính cần thiết đầu trục vít me (Chống uốn) | $$D_M=\sqrt[3]{\frac{32M_e}{\pi \sigma_M'}}$$ | ||
| Đường kính cần thiết đầu trục vít me (Chống xoắn) | $$D_T=\sqrt[3]{\frac{16T_e}{\pi \tau_M'}}$$ | ||
| Đường kính cần thiết đầu trục vít me | $$D_2'=\max(D_M, D_T)$$ |
Mục xin từ chối trách nhiệm
- Chúng tôi rất nghiêm túc trong việc hoàn thành các công cụ. Nhưng xin thứ lỗi, Blog này không đảm bảo nội dung của công cụ tính toán và kết quả tính toán của nó.
- Blog này không chịu trách nhiệm về bất kỳ thiệt hại, bất lợi hoặc rắc rối nào gây ra cho người dùng hoặc bên thứ ba do việc sử dụng công cụ tính toán và kết quả tính toán của nó.
- Nội dung của công cụ tính toán có thể bị thay đổi hoặc xóa mà không cần thông báo trước. Blog này không chịu trách nhiệm cho bất kỳ thiệt hại hoặc bất lợi do điều này gây ra.
Những công thức hay
- Công cụ tính toán góc lượng giác
- Công cụ tính toán ứng suất và chuyển vị của dầm thẳng dài liên tục
- Công cụ tính toán giảm chấn
- Công cụ tính toán lựa chọn vít me
- Công cụ tính toán độ bền cắt của then
- Công cụ tính toán bánh răng
- Tính toán mô men quán tính chính tâm
- Tính toán ứng suất và biến dạng của dầm
- Tính toán tải trọng và Ứng suất tới hạn dầm chịu lực dọc trục
- Chuyển đổi đơn vị lực
- Tính toán lực đẩy của xy lanh khí và thủy lực
- Tính toán khối lượng(vật liệu kim loại, nhựa, gỗ...)
- Công cụ tính toán mô men quán tính chính tâm của Mặt cắt phức hợp
- Công cụ tính toán mô men quán tính khối lượng
- Công cụ tính toán băng tải